Các nút của mạch điều khiển tự động như một hàm của thời gian
 Điện từ, điện tử, động cơ và điện khí nén được sử dụng rộng rãi trong các mạch tự động hóa. chuyển tiếp thời gian... Sơ đồ chuyển đổi thời lượng tín hiệu phổ biến nhất được hiển thị trong hình. 1. Sơ đồ hình. 1 và cung cấp một xung có thời lượng nhất định, bất kể thời gian nhấn nút SB. Sau khi nhấn nút SB, rơle K được kích hoạt, tạo xung để bật cơ chế. Thời lượng của xung được xác định bởi thời gian trễ của rơle KT. Nút SB có thể được thay thế bằng rơle lệnh KQ.
Điện từ, điện tử, động cơ và điện khí nén được sử dụng rộng rãi trong các mạch tự động hóa. chuyển tiếp thời gian... Sơ đồ chuyển đổi thời lượng tín hiệu phổ biến nhất được hiển thị trong hình. 1. Sơ đồ hình. 1 và cung cấp một xung có thời lượng nhất định, bất kể thời gian nhấn nút SB. Sau khi nhấn nút SB, rơle K được kích hoạt, tạo xung để bật cơ chế. Thời lượng của xung được xác định bởi thời gian trễ của rơle KT. Nút SB có thể được thay thế bằng rơle lệnh KQ.
Sơ đồ Hình. 8, b (với rơle thời gian điện từ) và hình. 1, c (với rơle thời gian điện khí nén hoặc cơ giới) được sử dụng để cung cấp xung ngắn hạn sau khi bắt đầu tác động của công tắc hành trình SQ. Trong các kế hoạch này và tiếp theo, thay vì liên hệ công tắc chuyển động Có thể sử dụng tiếp điểm rơle KQ.
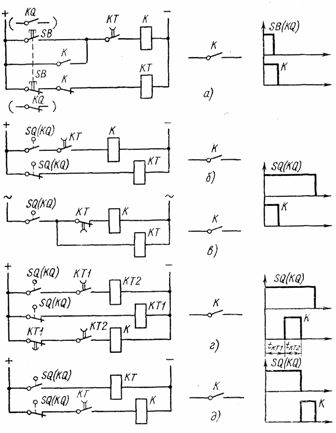
Cơm. 1. Mạch biến đổi thời lượng của tín hiệu
Sơ đồ hình.1d cung cấp một xung có thời lượng tKT2 với độ trễ thời gian tKT1 sau khi bắt đầu hoạt động của công tắc SQ.
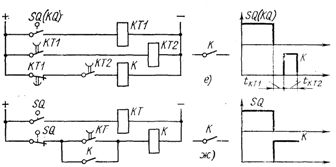
Nút mạch Hình. 1, e. Nếu cần thời gian trễ tKT1 trước khi đưa xung này vào, mạch điện trong hình. 1, e. Thời lượng xung là tKT2.
Trong các mạch điều khiển vị trí, mạch của Hình. 1g, thực hiện chức năng phát lệnh dài sau khi kết thúc tác động lên công tắc hành trình SQ. Lệnh bị hủy khi bắt đầu một hành động mới trên công tắc SQ.
Có thể đạt được độ trễ thời gian ngắn (tối đa 1,5 giây) bằng cách bật và tắt theo cách thông thường rơle trung gian do sự chuyển hướng của cuộn dây của chúng với tụ điện hoặc điốt.
Trong sơ đồ của hình. 2, và khi tiếp điểm KQ đóng, rơle K được kích hoạt với thời gian trễ được xác định bởi thời gian sạc của tụ điện C. Khi KQ đóng, rơle K cũng hoạt động trở lại với độ trễ do phóng điện của tụ điện.

Cơm. 2. Có được độ trễ thời gian bằng cách đảo chiều cuộn dây của rơle trung gian bằng tụ điện hoặc điốt
Để có được thời gian trễ chỉ khi bật rơle, hãy sử dụng mạch trong Hình. 2, b. Độ trễ khi tắt rơle thực tế không có, do tụ điện phóng điện nhanh đến điện trở R (điện trở của điện trở R nhỏ hơn đáng kể so với điện trở của cuộn dây rơle K). Một vấn đề tương tự được giải quyết bằng mạch trong hình. 2c, sử dụng một tiếp điểm mở của rơle KQ. Nhược điểm của mạch này là tổn thất năng lượng đáng kể qua điện trở khi không có tín hiệu.
Đề án trong hình. 2d, khi tiếp điểm KQ mở, rơle K tắt với thời gian trễ được điều khiển bởi điện trở R.
Theo sơ đồ trong hình. 2, e một thời gian trễ được tạo ra khi K tắt sau khi tiếp điểm của rơle điều khiển KQ được đóng lại.
Nếu cần có một độ trễ nhỏ trong quá trình quay trở lại của rơle K khi kích hoạt rơle lệnh KQ, sơ đồ trong hình. 2, e, trong đó cuộn dây của rơle K bị mắc song song bởi một điốt.
Sơ đồ tạo xung trong một khoảng thời gian và chu kỳ nhiệm vụ nhất định được hiển thị trong hình. 3, một. Thời lượng của xung được xác định bởi thời gian trễ của rơle KT2, thời gian tạm dừng được xác định bởi thời gian trễ của rơle KT1.
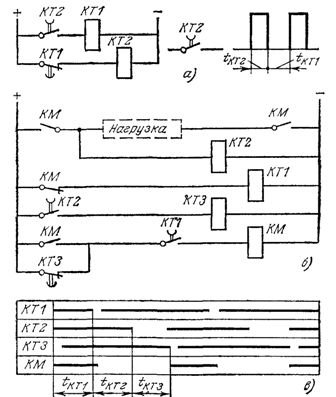
Cơm. 3. Mạch rơle tạo xung
Trong bộ lễ phục. 3, b, đưa ra sơ đồ bật định kỳ cơ chế với thời gian tạm dừng kéo dài Thời gian bật công tắc tơ KM bằng thời gian trễ của rơle KT1, thời gian tạm dừng là tổng về độ trễ của rơle KT2 và KTZ. Biểu đồ thời gian được hiển thị trong Hình. 3, c.
Sơ đồ bộ tạo xung của rơle thời gian hoặc yếu tố logic (xem bên dưới) cũng được sử dụng để điều chỉnh tốc độ hoạt động của các cơ chế tuyến tính. Bộ điều khiển nhiệt độ cũng trở nên phổ biến, chứa thiết bị chỉ huy KEP-12U, theo nhiều cách tương tự như rơle thời gian động cơ. Thiết bị có một động cơ điều hành, bánh răng biến thiên, trống cam, công tắc và 12 tiếp điểm.
Bộ điều tốc thường sử dụng sơ đồ cho hoạt động theo chu kỳ của thiết bị KEP-12U (Hình 4, a). Mạch được thực hiện bằng cách sử dụng các rơle K1 và K2 và các tiếp điểm của thiết bị điều khiển KT.1 và KT.2, sơ đồ mạch được hiển thị trong hình. 4, b.
Trước khi bắt đầu công việc, hãy bật công tắc S.Khi tiếp điểm rơle KQ được đóng lại trong thời gian ngắn, đưa ra lệnh bắt đầu chu kỳ làm việc, rơle K1 được cấp điện và tự chốt. Rơle K2 được kích hoạt bằng cách bật thiết bị điều khiển KT. Cuộn dây động cơ LM1 và LM2 được cấp điện và trống cam bắt đầu quay. Các tiếp điểm đầu ra của thiết bị KT.3, KT.4, v.v., đóng tuần tự, tại các thời điểm đã đặt (xem sơ đồ trong Hình 4, b) đưa ra các lệnh để bật các cơ chế tuyến tính. Ở giữa chu kỳ, tiếp điểm KT.1 mở và rơle K1 tắt.
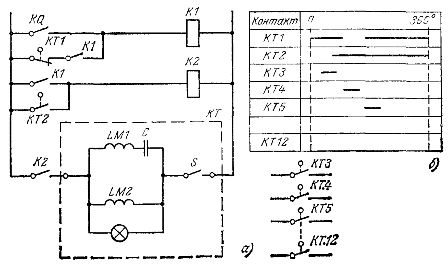
Hình 4. Bộ điều khiển tốc độ đường truyền với thiết bị KEP-12U
Cuộn dây rơ le K2 hỗ trợ cấp nguồn qua tiếp điểm của thiết bị KT.2. Sau khi xoay trống một góc 360°, tiếp điểm KT.2 mở ra, động cơ của thiết bị KEP-12U dừng lại. Chuỗi đã sẵn sàng cho chu kỳ tiếp theo.
Để kết luận, chúng tôi sẽ xem xét hai sơ đồ điều khiển từ xa độ trễ của rơle thời gian điện từ.
Để thay đổi độ trễ từ bảng điều khiển, bạn có thể sử dụng mạch rơle hai cuộn dây với cuộn kích hoạt KT.1 và cuộn hồi KT. 2 (khử từ), có MDS hướng ngược lại (Hình 5, a). MDS của cuộn nhả được điều chỉnh bằng chiết áp RP. Để tránh hoạt động lặp lại của CT sau khi đảo ngược từ hóa được trả về và ngắt, MDS của cuộn ngắt phải nhỏ hơn MDS đủ để kéo phần ứng, hoặc tiếp điểm đóng rơle riêng của nó phải được đưa vào cuộn mạch (Hình. 5, một).
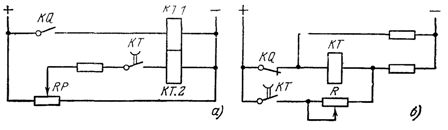
Hình 5. Sơ đồ điều chỉnh độ trễ của rơle thời gian từ xa
Theo sơ đồ trong hình.5, b thực hiện thay đổi từ xa thời gian trễ của rơle một cuộn dây. Khi tiếp điểm KQ mở, cuộn dây rơle KT chạy xung quanh dòng khử từ được điều chỉnh bởi điện trở R. Khi dòng khử từ tăng, độ trễ của rơle giảm và ngược lại. Với điện áp nguồn 220 V, rơle có cuộn dây cho điện áp danh định 110 V được sử dụng.