Ví dụ về sơ đồ truyền động điện cho các cơ chế kiểu ly tâm và chuyển động tịnh tiến
 Trong bộ lễ phục. 1 a thể hiện sơ đồ công nghệ máy bơm của hệ thống thoát nước mỏ được thiết kế để bơm nước ngầm từ gót giếng mỏ và các bề mặt bị chôn vùi. Việc lắp đặt bao gồm hai máy bơm 1H và 2H với các bình chứa 1B và 2B, đảm bảo việc sạc máy bơm liên tục.
Trong bộ lễ phục. 1 a thể hiện sơ đồ công nghệ máy bơm của hệ thống thoát nước mỏ được thiết kế để bơm nước ngầm từ gót giếng mỏ và các bề mặt bị chôn vùi. Việc lắp đặt bao gồm hai máy bơm 1H và 2H với các bình chứa 1B và 2B, đảm bảo việc sạc máy bơm liên tục.
Các máy bơm được điều khiển quay bằng động cơ không đồng bộ có sóc 1D và 2D, để có độ tin cậy cao hơn được kết nối với các phần xe buýt khác nhau của trạm biến áp hạ thấp (Hình 1, b). Nếu mực nước trong hố móng dưới mức công tác thì máy bơm không bơm được nước. Khi nước vượt quá mức làm việc, một trong các máy bơm được đưa vào hoạt động. Khi mực nước dâng cao trên mức khẩn cấp, một máy bơm dự phòng thứ hai được kết nối để làm việc.
Cơ chế chuyển động nhờ điện cho phép điều khiển khác nhau của động cơ bơm:
• tự động tùy theo mực nước trong hố móng,
• từ xa (từ phòng điều khiển),
• làng địa phương nút điều khiểnđặt trực tiếp tại các máy bơm.
Lựa chọn AU tự động và điều khiển từ xa thông qua các công tắc đa năng 1UP và 2UP. Công tắc 1PP và 2PP cho phép bạn chọn phương pháp điều khiển cho từng động cơ: điều khiển từ xa và cục bộ bằng các nút 1KU và 2KU. Công tắc phần mềm cho phép mặc đồng nhất thiết bị để sử dụng luân phiên động cơ 1D và 2D làm động cơ chạy.
Khởi động động cơ tự động máy bơm làm việc được thực hiện bằng công tắc phao 1PR, điều khiển mực nước làm việc. Động cơ máy bơm dự phòng được bật bằng rơle phao 2PR, điều khiển mức độ khẩn cấp.
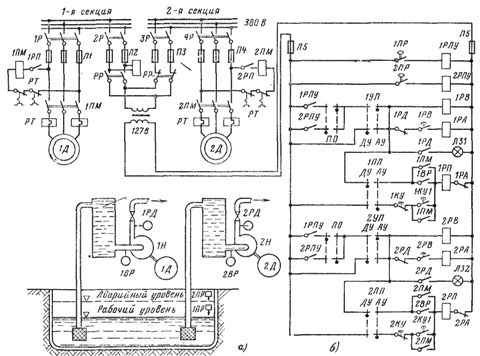
Cơm. 1. Hệ thống thoát nước (a) và mạch điện (b).
Nếu sau thời gian trễ của rơle 1PB hoặc 2PB, máy bơm không tạo ra áp suất cần thiết, động cơ sẽ bị ngắt khỏi mạng. Động cơ sẽ không khởi động ngay cả khi máy bơm không được đổ đầy nước (không đủ mực nước trong bình chứa và các tiếp điểm của rơle điều khiển đổ đầy 1BP hoặc 2BP đang mở).
Trong bộ lễ phục. Hình 2 cho thấy sơ đồ truyền động điện tự động của máy nén pittông. Có thể khởi động động cơ máy nén không đồng bộ từ vị trí lắp đặt máy nén bằng nút 2KP, cũng như từ phòng điều khiển bằng nút 1KP. Quyền khởi động được cấp thông qua rơle 2RP nếu áp suất trong bộ thu không khí (bộ thu) nhỏ hơn bình thường. Trong trường hợp này, tiếp điểm đóng của công tắc áp suất 1RP trong mạch của rơle 2RP đóng lại, dòng điện chạy qua cuộn dây của rơle 2RP và tiếp điểm đóng 2RP trong mạch của công tắc tơ của đường KL đóng lại.
Sau khi bật công tắc tơ KL, cuộn dây của van điện thủy lực 1KEG được cấp điện, cung cấp nước làm mát cho máy nén. Sau một thời gian, rơle RV nhận điện cho rơle 4RP, rơle này sẽ bật van 2KEG. Van này sẽ đóng cửa thoát khí từ máy nén ra khí quyển. Độ trễ của rơle PB dài hơn một chút so với thời gian khởi động động cơ, do đó van 2KEG mở và khởi động động cơ được tạo điều kiện thuận lợi.
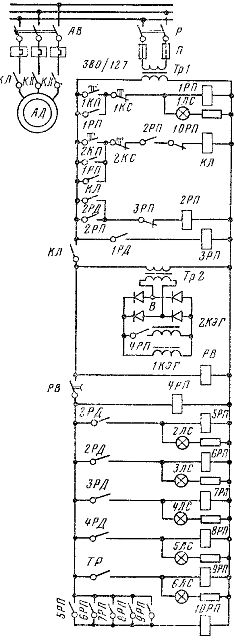
Cơm. 2. Sơ đồ truyền động điện của máy nén pittông.
Nếu lưu lượng không khí thấp và áp suất trong máy thu vượt quá định mức, thì tiếp điểm 1RD trong mạch rơle 3RP sẽ đóng lại. Cái sau, với tiếp điểm mở, tắt rơle 2RP. Mạch tiếp điểm KL mất điện và động cơ bị ngắt khỏi mạng. Khi lưu lượng không khí tăng và áp suất trong máy thu giảm so với định mức, công tắc áp suất sẽ đóng tiếp điểm trên 1RD của nó và sẽ bật rơle 2RP. Cuộn dây công tắc tơ KL sẽ được cấp điện trở lại và máy nén sẽ khởi động theo cách tương tự như mô tả ở trên.
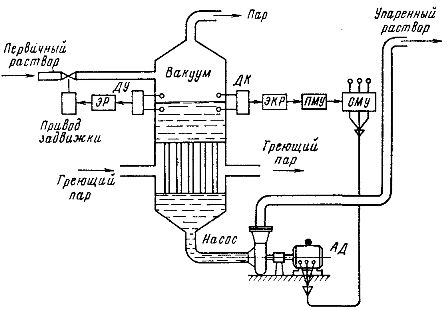
Cơm. 3. Sơ đồ nhà máy bay hơi chất lỏng
Mạch cung cấp khả năng tự động tắt động cơ nếu áp suất không khí trong tủ lạnh, áp suất của nước làm mát và dầu cung cấp cho các ổ trục chính và nhiệt độ dầu nằm ngoài phạm vi cho phép. Các thông số đã chỉ định được điều khiển bằng công tắc áp suất 2RD, 3RD, 4RD và rơle nhiệt độ TP. Tín hiệu tắt động cơ được đưa qua rơle 5RP — 9RP đến rơle 10RP, thực hiện ngắt khẩn cấp công tắc tơ KL.
Trong bộ lễ phục. Hình 3 cho thấy sơ đồ của một nhà máy bay hơi chất lỏng tự động.Trong trường hợp này, máy bơm được đưa vào quy trình công nghệ chính để sản xuất chất lỏng. Dung dịch kiềm được làm bay hơi trong thiết bị trao đổi nhiệt, tại đây nồng độ chất lỏng được tăng lên đến mức cần thiết. Thiết bị hoạt động trong điều kiện chân không để hạ nhiệt độ sôi của dung dịch và do đó giảm nhiệt cung cấp cho thiết bị bằng cách đun nóng bằng hơi nước. Việc lựa chọn chất lỏng từ thiết bị và cung cấp chúng cho giai đoạn bay hơi tiếp theo hoặc đến bể thu gom được thực hiện liên tục với sự trợ giúp của máy bơm. Mức nồng độ chất lỏng cần thiết được duy trì bởi một hệ thống kiểm soát thường trực.
Hệ thống này bao gồm các cảm biến để kiểm soát mức độ và nồng độ của chất lỏng DC trong thiết bị, bộ điều chỉnh điện tử ER và EK R., một van truyền động ở đầu vào của thiết bị và một ổ bơm điện ở đầu ra. Nồng độ của chất lỏng được đo bằng cảm biến nhiệt độ cầu vì nhiệt độ của hơi bão hòa bên trên chất lỏng phụ thuộc vào mật độ của nó.
Mức nồng độ yêu cầu được cài đặt bằng chiết áp trong bộ điều chỉnh điện tử EKR. Khi nồng độ tăng lên so với một mức nhất định, điện áp đầu ra của EKR và dòng điện điều khiển của PMU khuếch đại từ trung gian tăng lên. Tốc độ của động cơ máy bơm tăng lên và lưu lượng của máy bơm tăng lên. Điều này dẫn đến giảm thời gian bay hơi của chất lỏng đi qua thiết bị. Do đó, nồng độ bắt đầu giảm.
Khi mức chất lỏng trong thiết bị giảm do lưu lượng bơm tăng, cảm biến mức của điều khiển từ xa thông qua bộ điều chỉnh ER sẽ phát tín hiệu để mở thêm van đầu vào.Một dòng dung dịch bổ sung sẽ khôi phục mức trong thiết bị và góp phần khôi phục nhanh nhất mức nồng độ đặt trước.
Trong bộ lễ phục. Hình 4 cho thấy sơ đồ truyền động điện tự động của máy bơm có công suất lên tới 7 - 10 kW. Máy bơm được điều khiển bởi một động cơ cảm ứng lồng sóc. Tốc độ của động cơ được điều khiển bằng bộ khuếch đại từ tính ba pha SMU, được bao gồm trong mạch stato. Đầu tĩnh lớn của cài đặt cho phép cung cấp phạm vi cần thiết để điều chỉnh lưu lượng của máy bơm bằng một thay đổi nhỏ về tốc độ của động cơ.
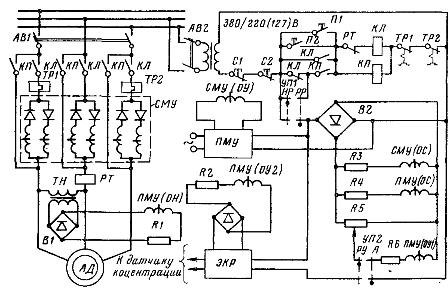
Cơm. 4. Sơ đồ truyền động điện của bơm bay hơi.
Để có được các đặc tính cơ đủ cứng của ổ điện, ngoài khớp nối dòng điện dương bên trong được tạo bởi các cuộn dây làm việc của SMU, một khớp nối điện áp âm được áp dụng. Việc sử dụng PMU giúp tăng công suất đầu ra của EKR đến mức cần thiết để điều khiển SMU, cũng như giảm kích thước của máy biến điện áp VT và tăng độ cứng của các đặc tính cơ học. Để tăng mô-men xoắn của động cơ trong quá trình khởi động, bộ khuếch đại công suất từ được di chuyển bởi công tắc tơ hộp số.
Mạch điều khiển động cơ cho phép khởi động và dừng máy bơm từ bảng điều khiển chính và từ vị trí lắp đặt (các nút P1, P2, C1, C2) Công tắc UP1 cho phép bạn đặt chế độ hoạt động không được kiểm soát của máy bơm HP khi SMU vẫn được bao quanh bởi công tắc tơ KP và máy bơm phát huy hiệu suất tối đa, cũng như chế độ điều chỉnh PP, khi KP ở cuối quá trình khởi động bị tắt bởi rơle dòng điện RT và cuộn dây làm việc của SMU được đưa vào mạch stato. Sử dụng công tắc UP2, bạn có thể chọn một trong các chế độ vận hành có thể điều chỉnh của máy bơm: A tự động hoặc điều khiển RU bằng tay.