Điều khiển pít-tông chuyển động của các cơ chế
mạch chuyển tiếp
 Trong bộ lễ phục. 1 cho thấy các biến thể khác nhau của sơ đồ điều khiển chuyển động pít-tông hành trình không đổi được cố định bởi bộ điều khiển SQ.
Trong bộ lễ phục. 1 cho thấy các biến thể khác nhau của sơ đồ điều khiển chuyển động pít-tông hành trình không đổi được cố định bởi bộ điều khiển SQ.
Các sơ đồ trong hình. 1, a-c được sử dụng khi chu kỳ bao gồm một chuyển động "tiến" B và một chuyển động "lùi" H đến vị trí bắt đầu. Sơ đồ 1, a và b được sử dụng với lệnh tự động do rơle KQ đưa ra. Rơle KT cung cấp một khoảng dừng trước khi bắt đầu chạy lùi. Trong sơ đồ của hình. 1, lệnh bắt đầu chu kỳ được đưa ra bởi bộ điều khiển hoặc công tắc vạn năng SM.
Để thực hiện chuyển động tịnh tiến vô hạn, sơ đồ trong hình. 1, d. Nếu số hành trình phải bị giới hạn bởi một giá trị n đã cho, thì tiếp điểm mở của rơle đếm hoặc một đơn vị gồm nhiều rơle, đếm các xung được cung cấp bởi tiếp điểm đóng của công tắc tơ "lưng" KM2, là được bao gồm trong mạch công tắc tơ «chuyển tiếp» KM1.
Một ví dụ về thực hiện chuyển động tịnh tiến với chiều dài hành trình thay đổi ở bốn vị trí được thể hiện trong hình. 2.Tiếp điểm SQ.1- SQ.4- của thiết bị chỉ huy SQ được sử dụng để tắt cơ chế ở vị trí 1—4 của hành trình "tiến", tiếp điểm SQ.5- ở vị trí ban đầu. Mạch sử dụng các lệnh xung do rơle tự động hóa KQ1 đưa ra, chẳng hạn như đóng khi nạp phôi và KQ2, đóng kết thúc hoạt động trung gian ở cuối mỗi hành trình.
Điều động tuần tự SQ.1 — SQ.3 của bộ điều khiển SQ được thực hiện bởi các tiếp điểm của rơle để đếm số lần di chuyển của cơ chế "lùi" KS1, KSZ và KS5. Rơle KS7, cố định lần di chuyển thứ tư "quay lại", tắt rơle KS1-KC6 và cấm bật "chuyển tiếp" tiếp theo cho đến khi màu xanh xuất hiện khi kết thúc hoạt động công nghệ với nhóm khoảng trống này (rơle KR). Tiếp điểm mở của rơle KR trong mạch cuộn KC7 đưa mạch về trạng thái ban đầu.
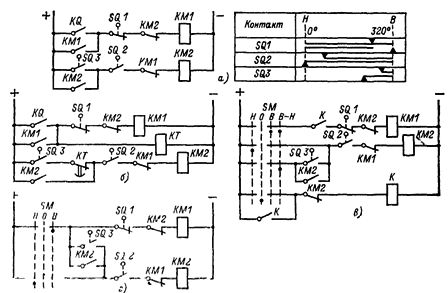
Cơm. 1. Mạch điều khiển rơ le chuyển động tịnh tiến
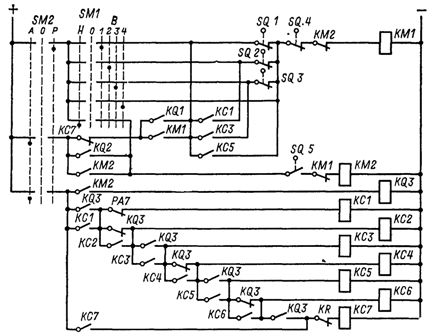
Hình 2. Sơ đồ điều khiển rơle pittông có chiều dài hành trình thay đổi
mạch logic
Mạch điều khiển chuyển động của pít-tông được chế tạo trên các phần tử của sê-ri «Logic T» được hiển thị trong hình. 3. Các phần tử D1-D3 của loại T-201 được sử dụng để phối hợp các tín hiệu rơle đầu vào với các phần tử logic.
Bộ nhớ của các phần tử D4.1, D4.2 cố định sự hiện diện của lệnh di chuyển "về phía trước" khi rơle KQ được bật xung. Công tắc tơ phía trước KM1 được bật thông qua bộ khuếch đại D5. Khi kết thúc chuyển động của cơ chế "chuyển tiếp", khi đóng tiếp điểm của bộ điều khiển SQ 1, tín hiệu 1 xuất hiện ở đầu ra của phần tử tương ứng D2, tín hiệu này sẽ tắt bộ nhớ D4 và công tắc tơ KM1 và bật bộ nhớ trên các phần tử D6. Trong trường hợp này, lệnh di chuyển "quay lại" được đưa ra và ghi nhớ.Lệnh này bị xóa và chuyển động lùi bị dừng khi tiếp điểm của bộ điều khiển SQ 2 đóng ở vị trí ban đầu, khi tín hiệu 1 xuất hiện ở đầu ra của phần tử tương ứng D3, vô hiệu hóa bộ nhớ D6.
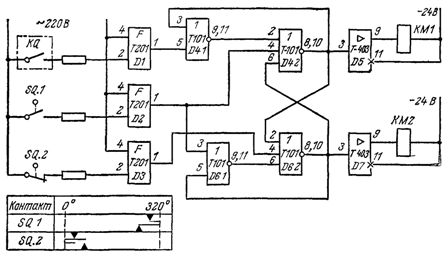
Cơm. 3. Sơ đồ điều khiển chuyển động tịnh tiến trên các phần tử của chuỗi «Logic T»
Bộ nhớ D4 và D6 bị chặn nên chỉ có thể bật một trong hai bộ nhớ. Khi bộ nhớ D4 được bật, tín hiệu 1 từ đầu ra của phần tử D4.2 được đưa đến đầu vào 2 của phần tử D6.2, vô hiệu hóa bộ nhớ D6 và ngược lại. Khi bộ nhớ D6 được bật, tín hiệu 1 từ đầu ra của phần tử D6 2 được đưa đến đầu vào 6 của phần tử D4.2, vô hiệu hóa bộ nhớ D4.