Mạch điều khiển contactor và bảo vệ động cơ
 Tùy theo chức năng cần thực hiện mà có các mạch điều khiển động cơ contactor khác nhau.
Tùy theo chức năng cần thực hiện mà có các mạch điều khiển động cơ contactor khác nhau.
Hình 1a cho thấy sơ đồ kết hợp của bộ khởi động từ không thể đảo ngược... Trong đó, cách sắp xếp các phần tử trùng với cách sắp xếp trong tự nhiên, nghĩa là tất cả các phần tử nằm trong hộp khởi động được nhóm ở phía bên trái của sơ đồ, và trạm nút nhấn với các nút «Bắt đầu» và «Dừng» thể hiện ở phía bên phải của sơ đồ.
Trạm nút thường được đặt một khoảng cách từ khởi động từ tính… Để hiểu nguyên lý hoạt động của mạch điều khiển động cơ, sơ đồ chi tiết (cơ bản) thường được sử dụng (Hình 1.b). Bằng cách nhấn nút khởi động SB2, mạch cuộn dây công tắc tơ KM được đóng lại, bao gồm ba tiếp điểm KM của mạch cung cấp động cơ. Trong trường hợp này, tiếp điểm khối KM được kết nối song song với nút khởi động SB2 cũng đóng lại. Điều này cho phép bạn cung cấp năng lượng cho cuộn dây KM khi nhả nút SB2.
Động cơ dừng lại bằng cách nhấn nút SB1 trong khi cuộn dây tắt và nhả các tiếp điểm nguồn (chính) và tiếp điểm phụ. Khi nhả nút SB1, mạch của cuộn dây KM sẽ bị mất điện. Để khởi động lại động cơ, nhấn lại nút SB2.
Mạch này cũng cung cấp cái gọi là bảo vệ bằng 0, tức là nếu điện áp nguồn biến mất hoặc giảm xuống 50-60% so với danh định, cuộn dây KM sẽ không giữ các tiếp điểm nguồn KM và động cơ sẽ bị tắt. Khi điện áp xuất hiện hoặc tăng đến giá trị gần với giá trị danh định, bộ khởi động từ sẽ không hoạt động một cách tự nhiên. Để bật nó lên, bạn cần nhấn lại nút bắt đầu.
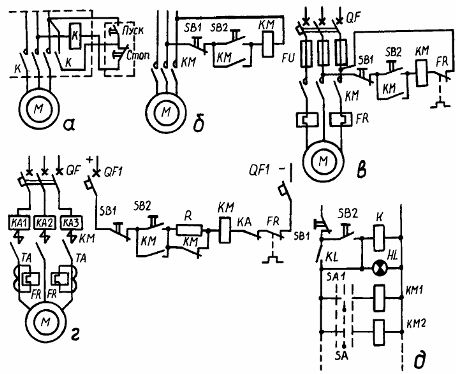
Cơm. 1. Sơ đồ điều khiển và bảo vệ động cơ: a — kết hợp và b — sơ đồ chi tiết của bộ khởi động từ không đảo chiều; c — bảo vệ động cơ bằng cầu chì và rơle nhiệt; d — sơ đồ trạm điều khiển động cơ mạnh mẽ; d - bảo vệ không từ rơle trung gian
Bảo vệ động cơ khỏi quá nhiệt của cuộn dây được thực hiện trong quá tải kéo dài rơle nhiệt FR, và bảo vệ chống quá tải lớn hoặc ngắn mạch được cung cấp bởi cầu chì FU hoặc cầu dao QF (Hình 1, c). Để bảo vệ chống quá tải kéo dài, hai rơle nhiệt được sử dụng, vì với một rơle, trong trường hợp cầu chì bị đứt, nối tiếp với phần tử gia nhiệt của rơle này, động cơ sẽ được kết nối với mạng một pha và họ sẽ không được bảo vệ. Các tiếp điểm ngắt của các rơle này được mắc nối tiếp với cuộn dây khởi động. Khi một trong số chúng mở ra, cuộn dây KM bị mất điện và động cơ dừng lại, như khi nhấn nút SB1.
Một trạm điều khiển động cơ công suất cao được thể hiện trong hình. 1, d. Bảo vệ ngắn mạch được cung cấp bởi rơle quá tải KA1 — KA3, bảo vệ quá tải được cung cấp bởi rơle nhiệt FR được nối qua máy biến dòng. Cuộn dây của công tắc tơ ba cực được cung cấp dòng điện một chiều. Để giảm dòng điện trong cuộn dây của công tắc tơ sau khi đưa vào mạch, một điện trở bổ sung R được đưa vào, điện trở này trước đó đã bị ngắn mạch bởi tiếp điểm KM đang mở.
Trong các mạch điều khiển thủ công có nhiều bộ điều khiển, công tắc hoặc các thiết bị khác, rơle trung gian được sử dụng để bảo vệ trung tính. (Hình 1, e) Để đặt điện áp vào mạch điều khiển, nhấn nút SB2, từ đó bật rơle trung gian K, bao gồm tiếp điểm đóng K và đèn tín hiệu HL, cho biết có điện áp trong mạch điều khiển . Sau khi nhả nút SB2, cuộn dây rơle sẽ bị chặn trong khi các mạch của bộ điều khiển SM1, chuyển mạch gói SM, v.v. và các cuộn dây của công tắc tơ KM1, KM2, v.v., sẽ được cấp điện.
Trong các sơ đồ được xem xét, các tiếp điểm tự khóa là cần thiết cho hoạt động liên tục của động cơ. Thông thường trong thực tế, động cơ chỉ cần chạy khi nhấn nút khởi động, ví dụ như trong máy nâng hạ. Trong trường hợp này, không có nút Dừng trong mạch điều khiển (Hình 2, a). Đôi khi cần đảm bảo hoạt động của biến tần ở hai chế độ, tức là bật trong thời gian ngắn khi cài đặt máy hoặc trong thời gian dài. Sau đó, chỉ cần nhấn nhanh nút SB2 (Hình 2.b), cuộn dây của công tắc tơ KM sẽ bật và tiếp điểm tự khóa của KM sẽ đóng lại, trong khi động cơ sẽ chạy khi nhả nút SB2 .
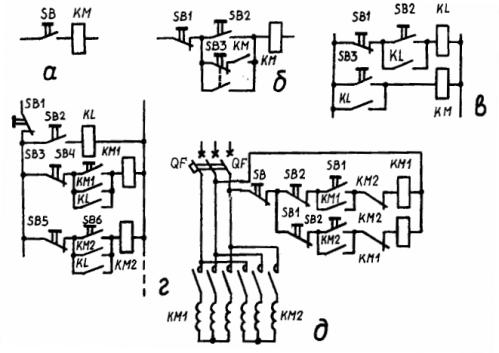
Cơm. 2. Các loại mạch điều khiển cho động cơ không đồng bộ: a — ở chế độ chạy nhanh; b và c — trong thời gian làm việc và chạy bộ kéo dài; d — bao gồm đồng thời một số động cơ; d - khởi động vô cấp của động cơ hai tốc độ
Đối với chế độ điều khiển động cơ, nhấn nút SB3, tiếp điểm đóng của nó sẽ bật cuộn dây của công tắc tơ KM và tiếp điểm mở sẽ ngắt mạch tự khóa của công tắc tơ. Nhược điểm của mạch này là tiếp điểm mở của nút SB3 có thể đóng trước khi tiếp điểm của khối KM mở ra và động cơ không tắt. Mạch hiển thị trong hình. 2, f, không có khiếm khuyết này.
Để hoạt động liên tục, nhấn nút SB2 sẽ bật rơle trung gian K. Một trong các tiếp điểm K bật cuộn dây của công tắc tơ KM và nút còn lại đồng thời chặn nút SB2, do đó tắt hoạt động của động cơ bằng nút khởi động phát hành. Để bắt đầu hoạt động, nhấn nút SB3 và giữ nó trong thời gian cần thiết.
Hình 2d cho thấy sơ đồ khởi động nhiều động cơ cùng lúc từ một nút khởi động sử dụng rơle trung gian ... Nút SB2 bật rơle K, các tiếp điểm đóng đồng thời bật các cuộn dây của công tắc tơ KM1, KM2, v.v. Dừng đồng thời tất cả các động cơ bằng nút SB1. Để bật và tắt từng động cơ riêng lẻ, hãy sử dụng các nút SB3, SB4 và SB5, SB6, v.v. tương ứng.
Sơ đồ khởi động vô cấp của động cơ rôto lồng sóc hai cấp tốc độ như hình vẽ. 2, e. Để khởi động động cơ ở tốc độ đầu tiên, nút SB1 được sử dụng, ở tốc độ thứ hai - SB2.Cả hai nút đều được khóa liên động cơ học để ngăn động cơ hoạt động ở hai tốc độ cùng một lúc.
Các mạch khởi động cũng bị chặn bằng điện. Vì vậy, ví dụ, khi cuộn dây KM1 được kích hoạt, tiếp điểm mở sẽ ngắt mạch của cuộn dây KM2, loại trừ khả năng đưa nó vào. Để chuyển sang tốc độ thứ hai, bạn cần nhấn nút SB2, trong khi mạch của cuộn dây KM1 bị hỏng và nó tắt. Cuộn dây của mạch KM2 nhận điện và bật động cơ ở tốc độ thứ hai.
Điều khiển đảo ngược động cơ không đồng bộ được thực hiện bằng hai công tắc tơ (Hình 3, a).
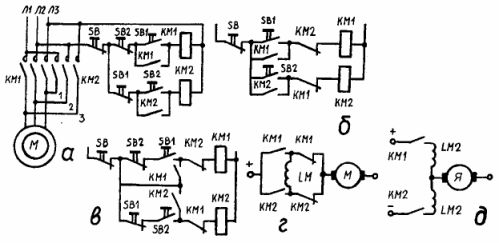
Quả sung. 3. Sơ đồ điều khiển động cơ: a — bộ khởi động từ đảo chiều có chặn cơ học; b — tương tự với chặn điện; c — sự kết hợp của các tùy chọn a và b; d và e — khởi động và đảo chiều động cơ DC công suất thấp
Công tắc tơ KM1 được sử dụng để nối động cơ thuận và KM2 được sử dụng theo chiều nghịch. Để ngăn chặn việc vô tình bật đồng thời hai công tắc tơ, dẫn đến đoản mạch, mạch sử dụng (xem Hình 3, a) chặn cơ học lẫn nhau với hai tiếp điểm ngắt của các nút SB1 và SB2. Nhấn nút SB1, bật mạch của cuộn KM1 và ngắt mạch cuộn KM2.
Khi nhấn đồng thời các nút SB1 và SB2, các mạch của cuộn dây KM1 và KM2 bị hỏng và không có công tắc tơ nào bật lên. Việc chặn được thực hiện bởi hai tiếp điểm ngắt KM2 và KM1, lần lượt được bao gồm trong các mạch của cuộn dây KM1 và KM2 (Hình 3, b). Để đảo ngược động cơ trong sơ đồ này, trước tiên bạn phải nhấn nút SB.
Mạch trong hình. 3, c là sự kết hợp của hai mạch trước đó, tức là có chặn kép.Nút SBI bật công tắc tơ KM1 và mạch cuộn dây của công tắc tơ KM2 bị đứt do tiếp điểm mở đồng thời của nút SB1 và tiếp điểm của khối KM1.
Hình 3, d và e cho thấy các sơ đồ đơn giản nhất để khởi động và đảo chiều động cơ được kích thích tuần tự công suất thấp ... Các động cơ như vậy được kết nối với mạng mà không cần khởi động biến trở. Theo sơ đồ trong hình. 3, d, khởi động và đảo chiều động cơ kích từ nối tiếp được thực hiện bằng hai rơle trung gian. Động cơ được đảo chiều bằng cách đảo chiều dòng điện trong cuộn kích từ LM. Trong các động cơ có hai cuộn dây trường nối tiếp tạo ra từ thông ngược chiều nhau, mạch chuyển mạch và đảo chiều chỉ có hai tiếp điểm tiếp xúc (xem Hình 3, e).
Như có thể thấy từ các sơ đồ điều khiển được xem xét, việc tự động hóa quá trình khởi động và đảo chiều động cơ không đồng bộ rôto lồng sóc là dễ dàng nhất. Trong trường hợp này, tất cả các điều khiển khi khởi động được giảm xuống để kết nối động cơ với mạng điện và khi dừng - ngắt kết nối khỏi mạng.
Phức tạp hơn là tự động hóa khởi động, dừng và dừng động cơ cảm ứng với cuộn dây pha của rôto, động cơ lồng sóc cảm ứng có công suất tăng, động cơ DC công suất trung bình và cao, động cơ cảm ứng đa tốc độ với khởi động bước, cũng như như động cơ đồng bộ. Các động cơ này được điều khiển như một chức năng của thời gian, tốc độ Và hiện hành.
Ngoài các trường hợp trên, điều khiển động cơ có thể được thực hiện và theo nguyên tắc đường dẫn, khi động cơ khởi động và chậm dần khi cơ thể làm việc đạt đến một vị trí nhất định trong không gian.Các hệ thống thực hiện các chức năng như vậy được gọi là hệ thống vòng hở vì chúng không có phản hồi giữa giá trị đầu ra và giá trị đầu vào.