Điều khiển động cơ như là một chức năng của hiện tại
 Điều khiển động cơ có thể được thực hiện tùy thuộc vào cường độ của dòng điện stato. Mạch khởi động như là một chức năng của dòng điện của động cơ cảm ứng rôto dây quấn được thể hiện trong hình. 1 a.
Điều khiển động cơ có thể được thực hiện tùy thuộc vào cường độ của dòng điện stato. Mạch khởi động như là một chức năng của dòng điện của động cơ cảm ứng rôto dây quấn được thể hiện trong hình. 1 a.
Tại thời điểm bắt đầu, dòng điện đạt đến giá trị I1 và sau một khoảng thời gian nhất định, nó giảm xuống giá trị I2 (hình b). Tại thời điểm này, một phần của điện trở khởi động trong mạch rôto tự động bị đoản mạch, dòng điện tăng lên giá trị I1, sau đó lại giảm xuống giá trị I2, khiến một phần khác của điện trở khởi động bị đoản mạch. Quá trình này được lặp lại cho đến khi tất cả các giai đoạn của điện trở khởi động bị ngắn mạch. Đối với những mục đích này, một rơle quá dòng được sử dụng, các cuộn dây được bao gồm trong mạch nguồn của động cơ.
Khi bạn bấm vào nút bắt đầu SB1 (xem hình A) công tắc tơ KM được kích hoạt, các tiếp điểm chính kết nối động cơ với mạng ở điện trở khởi động chung trong mạch rôto. Trong trường hợp này, cuộn dây của rơle KA nhận điện, các tiếp điểm mở của chúng nằm trong mạch của cuộn dây tăng tốc K1.Rơle KA được đặt sao cho thời gian đáp ứng ngắn hơn so với thời gian đáp ứng của công tắc tơ K1. Ngoài ra, nó phá vỡ các tiếp điểm ở giá trị tối đa cho phép bắt đầu từ hiện tại mở và khi dòng điện giảm xuống giá trị chuyển mạch của nó, chúng sẽ đóng lại, do đó cuộn dây K1 được bật thông qua các tiếp điểm của rơle KA tại thời điểm ngắn mạch của giai đoạn điện trở khởi động.
Rơle KA sẽ hoạt động trước khi công tắc tơ tăng tốc K1 được cấp điện và động cơ sẽ tăng tốc khi điện trở khởi động được đưa vào đầy đủ. Khi dòng chuyển mạch khởi động giảm, các tiếp điểm của rơle KA sẽ đóng lại và cuộn dây K1 sẽ bật. Đồng thời, tiếp điểm K1 đóng lại, cung cấp khả năng tự cấp nguồn cho cuộn dây độc lập với rơle KA và tiếp điểm trong mạch điều khiển mở ra, ngăn chặn việc đưa vào sớm bộ gia tốc K2.
Do các tiếp điểm cung cấp K1 là một phần của ngắn mạch điện trở khởi động, dòng điện stato tăng đến giá trị cực đại và rơle KA, khi được kích hoạt, sẽ mở các tiếp điểm của nó trong mạch cung cấp của cuộn dây K2. Khi động cơ đạt đủ tốc độ và dòng điện stato giảm trở lại dòng điện chuyển mạch, các tiếp điểm của rơle KA sẽ đóng và bật cuộn dây K2, làm ngắn mạch giai đoạn thứ hai của điện trở khởi động với các tiếp điểm của nó.
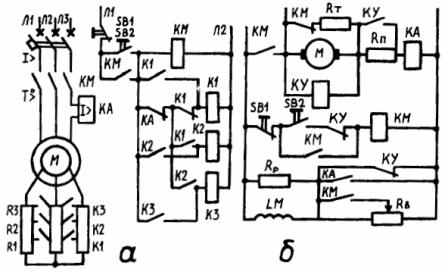
Cơm. 1. Các mạch điều khiển phụ thuộc vào dòng điện: a — động cơ không đồng bộ có rôto pha; b — Động cơ điện một chiều kích từ song song
Trong trường hợp này, dòng điện stator tăng trở lại, rơle KA sẽ hoạt động và mở các tiếp điểm của nó. Cuộn dây K2 sẽ không bị mất điện vì nó sẽ có thời gian đóng với các tiếp điểm phụ K2.Dòng điện stato tiếp tục giảm sau lần tăng tốc tiếp theo sẽ khiến cuộn dây K3 bật và đoản mạch giai đoạn cuối của điện trở khởi động. Nhấn nút SB sẽ dừng động cơ và mạch đã sẵn sàng cho lần khởi động tiếp theo. Sử dụng các rơle dòng điện được cấu hình để trở về ở dòng điện 12, có thể dừng và đảo ngược nhiều loại truyền động điện khác nhau. Nhược điểm của các mạch điều khiển trong chức năng hiện tại là số lượng tiếp điểm khá lớn.
Để điều khiển không thể đảo ngược động cơ DC kích thích song song công suất vài kilowatt, có thể sử dụng một tầng duy nhất của biến trở khởi động (xem Hình C). Sơ đồ cho thấy: điều chỉnh điện trở RB trong mạch kích thích; điện trở xả Rp nối song song với cuộn kích thích LM; một điện trở hãm RT mắc song song với phần ứng M khi ngắt mạng và một điện trở khởi động RP mắc nối tiếp với mạch phần ứng trong thời gian khởi động. Để tạo ra từ thông cực đại khi khởi động, cuộn kích từ trường LM ở vị trí ban đầu được bật ở điện áp đầy đủ.
Khi nhấn nút SB2, phần ứng của động cơ từ công tắc tơ đường dây KM được nối nối tiếp với mạng có điện trở R. Rơle điều khiển khởi động SC hoạt động như một chức năng của dòng điện phần ứng. Khi dòng điện tăng, tiếp điểm đóng của KA điều khiển điện trở RB, làm tăng từ thông kích thích và khi dòng điện giảm, tiếp điểm của KA mở ra và cuộn LM được mắc nối tiếp với điện trở của biến trở RB, do mà dòng điện từ giảm.
Khi động cơ được khởi động, dòng điện phần ứng khởi động tăng lên sẽ bật rơle KA và cuộn dây LM tạo ra từ thông cực đại. Khi đạt đến một tốc độ nhất định, công tắc tơ tăng tốc K được bật, điện trở khởi động RP bị ngắn mạch, sau đó động cơ hoạt động theo đặc tính tự nhiên của nó. Khi dòng điện phần ứng giảm (do tăng tốc động cơ) trước khi rơle KA đóng điện, tiếp điểm KA trong mạch kích thích sẽ mở.
Cuộn dây LM sẽ mắc nối tiếp với điện trở RB làm cho từ thông kích từ yếu đi và dòng điện phần ứng tăng lên tương ứng. Rơle KA sẽ hoạt động trở lại làm tăng từ thông và đồng thời tăng tốc độ động cơ. Trong quá trình khởi động, rơle tàu vũ trụ được kích hoạt nhiều lần cho đến khi động cơ đạt đến tốc độ do bộ biến trở điều khiển RB đặt. Một thiết bị rung hoạt động như một chức năng hiện tại đơn giản hóa mạch so với các mạch điều khiển như một chức năng của thời gian.
Khi bật động cơ bằng cách nhấn nút SB1, phần ứng được bật từ tiếp điểm mở KM đến điện trở hãm RT và hãm động được thực hiện tự động. Khi bắt đầu dừng, từ trường yếu đi một chút do tiếp điểm KM trên thanh trượt của biến trở điều chỉnh bị hở và dòng điện kích thích đi qua toàn bộ điện trở RB. Khi tốc độ động cơ giảm hơn nữa, công tắc tơ tăng tốc K bị ngắt điện và từ thông tăng lên khi cuộn dây kích thích được bật thành điện áp toàn dòng thông qua tiếp điểm mở K, dẫn đến mô men hãm tăng lên.