Mạch điều khiển động cơ như một chức năng của tốc độ
 Trong điều khiển động cơ, tốc độ được theo dõi như một hàm của tốc độ rôto động cơ để tác động đến các phần tử điều khiển tương ứng khi nó thay đổi.
Trong điều khiển động cơ, tốc độ được theo dõi như một hàm của tốc độ rôto động cơ để tác động đến các phần tử điều khiển tương ứng khi nó thay đổi.
Rơle điều khiển tốc độ hoặc máy phát điện đo lường nhỏ có thể được sử dụng trong mạch điều khiển khởi động động cơ. Tuy nhiên, chúng cực kỳ hiếm khi được sử dụng cho các mục đích này do thiết kế phức tạp, chi phí cao và không đủ độ tin cậy. Do đó, tốc độ động cơ được điều khiển bằng phương pháp gián tiếp. Trong động cơ không đồng bộ và đồng bộ, tần số quay được điều khiển bởi emf và tần số của dòng điện rôto, và trong động cơ điện một chiều bởi emf phần ứng.
Trong bộ lễ phục. 1, a và b trình bày sơ đồ khởi động tự động động cơ một chiều kích từ song song tùy thuộc vào tần số quay và tùy thuộc vào EMF và điện áp phần ứng từ thời điểm khởi động. Việc kiểm soát tần số quay được thực hiện bằng cách đo EMF của động cơ, thay đổi tỷ lệ thuận với tần số quay.
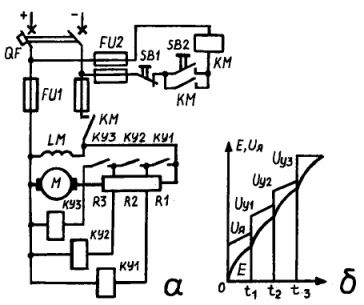
Cơm. 1.Các mạch điều khiển như một hàm của tốc độ: a và b — sơ đồ mạch và khởi động của động cơ DC kích thích song song
Do EMF tỷ lệ thuận với tốc độ động cơ, nên việc nhập tự động các giai đoạn riêng lẻ của bộ biến trở khởi động được thực hiện ở một độ lớn nhất định của điện áp khởi động của các công tắc tơ tăng tốc KM1, KM2 và KMZ, mỗi giai đoạn được đặt ở một độ rút nhất định giá trị. Bằng cách nhấn bộ khởi động nút SB2 bật công tắc dòng KM. Tất cả các điện trở R1, R2, R3 sẽ mắc nối tiếp với cuộn dây phần ứng và sẽ hạn chế dòng điện.
Ở một tốc độ n1 nào đó, điện áp Uy1 của cuộn dây công tắc tơ K1 là

where Đây Đây là hệ số của máy.
Khi Uy1 bằng với điện áp kéo xuống, công tắc tơ KM1 sẽ tác động và ngắn mạch điện trở R1. Việc tăng thêm tốc độ quay cho đến khi quay n2 và n3 sẽ dẫn đến tăng điện áp trên cuộn dây của công tắc tơ K2 và đoản mạch đến giá trị


Trong trường hợp này, các công tắc tơ K2 và ngắn mạch sẽ hoạt động nối tiếp và ngắn mạch các điện trở R2 và R3. Sau khi ngắn mạch điện trở R3, quá trình khởi động sẽ hoàn thành và động cơ có thể chạy trong một thời gian dài.
EMF trong mạch rôto của động cơ cảm ứng tỷ lệ với độ trượt, tức là E2s = E2s. Ở đây E2 là emf của rôto đứng yên.
Độ trượt càng thấp, EMF càng thấp, nghĩa là tốc độ rôto động cơ càng cao. Để điều khiển khởi động động cơ AC có rôto quấn, rơle được sử dụng để điều khiển giá trị EMF trong mạch rôto.Các thiết bị tương ứng (rơle, công tắc tơ) có điện trở khởi động ngắn mạch được điều chỉnh theo các điện áp này.
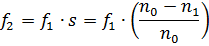
Để điều khiển động cơ cảm ứng rô-to dây quấn và động cơ đồng bộ, phương pháp tần số cũng có thể được sử dụng như một hàm của tốc độ. Phương pháp này dựa trên sự phụ thuộc đã biết của tần số dòng điện rôto f2 vào tần số quay của trường stato n0 và rôto n2, tức là
Vì mỗi tốc độ rôto tương ứng với một giá trị f2 nhất định, nên một rơle được đặt ở tần số đó và được kết nối với mạch rôto của động cơ sẽ tác động lên mạch cuộn dây của công tắc tơ. Công tắc tơ sẽ làm ngắn mạch các tầng điện trở ở một tốc độ nhất định.
Phanh bằng động cơ đối lập được thực hiện tùy thuộc vào tốc độ rơle điều khiển tốc độ SR. Trong Hình 2, a, b chỉ ra các ví dụ về dừng động cơ không đồng bộ bằng đối lưu.
Cơm. 2. Sơ đồ dừng động cơ không đồng bộ bằng phương pháp đảo ngược: a — không thể đảo ngược; b - có thể đảo ngược
Chúng ta hãy xem làm thế nào các chương trình này hoạt động.
Nhấn nút SB2 sẽ bật cuộn dây của công tắc tơ KM (xem Hình 2, a), thao tác này sẽ đóng các tiếp điểm nguồn và chặn nút SB2. Đồng thời, tiếp điểm của khối mở KM trong mạch cuộn dây của công tắc tơ phanh KM1 và rơle điều khiển tốc độ SR ngắt kết nối chúng khỏi mạng. Khi rôto động cơ đạt đến một tốc độ nhất định, tiếp điểm SR sẽ đóng lại, nhưng điều này sẽ không làm cho công tắc tơ KM1 hoạt động nữa. Động cơ tiếp tục chạy bình thường.
Dừng động cơ bằng phanh chuyển đổi ngược chiều được thực hiện bằng cách nhấn nút SB.Đồng thời, cuộn dây của công tắc tơ KM được trung hòa và các tiếp điểm chính của nó biến mất và ngắt kết nối động cơ khỏi mạng. Tiếp điểm mở KM trong mạch công tắc tơ hãm của KM1 sẽ đóng lại. Vì tại thời điểm này, tiếp điểm của rơle điều khiển tốc độ SR được đóng lại, các tiếp điểm chính của công tắc tơ phanh ngay lập tức được bật và cuộn dây stato được đảo ngược, từ trường sẽ bắt đầu quay theo hướng ngược lại, tức là. vòng quay của rôto và động cơ sẽ dừng lại bằng cách chuyển đổi bộ đếm. Tốc độ của rôto giảm và ở một giá trị nhỏ nhất định, các tiếp điểm của rơle điều khiển tốc độ RKS sẽ mở và ngắt kết nối động cơ khỏi nguồn điện.
Trong trường hợp điều khiển ngược với phanh ngược chiều (Hình 2, b), động cơ được khởi động về phía trước bằng cách nhấn nút SB1, bằng cách đóng mạch cuộn dây của công tắc tơ KM1, đảm bảo rằng động cơ được kết nối với mạng. Rôto động cơ sẽ bắt đầu quay và khi đạt đến một tốc độ nhất định, tiếp điểm đóng SR1 của rơle điều khiển tốc độ sẽ đóng lại và tiếp điểm mở SR2 sẽ mở ra.
Việc bật cuộn dây của công tắc tơ KM2 sẽ không xảy ra do tiếp điểm mở của công tắc tơ KM1 đã bị đứt mạch. Ở vị trí này, động cơ sẽ tiếp tục chạy cho đến khi nhấn nút SB. Khi nhấn nút SB, mạch của cuộn dây KM1 bị tắt. Điều này sẽ đóng tiếp điểm ngắt KM1 và mạch cuộn dây của công tắc tơ KM2 sẽ nhận điện.
Cuộn dây stato động cơ sẽ ăn khớp để đảo chiều. Khi rôto tiếp tục quay theo cùng một hướng theo quán tính, quá trình hãm đối lập xảy ra.Khi tốc độ giảm xuống một giá trị nhỏ nhất định, rơle điều khiển tốc độ sẽ mở tiếp điểm SR1, công tắc tơ KM2 sẽ tắt và ngắt kết nối động cơ khỏi mạng.
Để khởi động động cơ ở chế độ lùi, nhấn nút SB2. Toàn bộ quá trình sẽ tương tự như quá trình được mô tả. Lúc này công tắc tơ KM1 đảm nhận vai trò của công tắc tơ phanh và các tiếp điểm SR2 của rơle điều khiển tốc độ sẽ điều khiển quá trình phanh.
Tự động khởi động động cơ đồng bộ có liên quan đến những khó khăn đã biết, vì trong trường hợp này, không chỉ cần hạn chế dòng khởi động mà còn phải đồng bộ hóa máy với mạng.
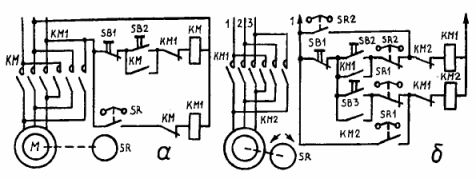
Mạch điều khiển cho động cơ đồng bộ công suất thấp được thể hiện trong hình. 3. Giới hạn dòng khởi động được cung cấp bởi các điện trở hoạt động có trong cuộn dây stato. Trước khi khởi động động cơ, hãy bật các công tắc đầu vào tự động QF và QF1 của nguồn điện AC và DC, giúp bảo vệ nhiệt và tối đa. Bằng cách nhấn nút khởi động SB2, cuộn dây của công tắc tơ KM được bật và cuộn dây stato của động cơ đồng bộ thông qua các tiếp điểm chính của KM được kết nối với mạng thông qua các điện trở khởi động Rn. Cuộn dây tự khóa và tiếp điểm của nó trong mạch DC bao gồm rơle khóa KV, tiếp điểm đóng của nó, khi đóng, chuẩn bị bật các cuộn dây của công tắc tơ K1 và K2.
Rơle tần số KF1 và KF2 trong mạch kích thích của rôto LM hoạt động tùy thuộc vào tốc độ động cơ, khi khởi động, khi rôto trượt lớn nhất, các tiếp điểm ngắt của rơle KF1 và KF2 sẽ mở.Việc mở các cuộn dây xảy ra trước khi rơle chặn KV bật và cuộn dây K1 sẽ không nhận được điện. Các tiếp điểm của rơle KF1 và KF2 sẽ đóng lại khi RPM của động cơ đạt khoảng 60-95% đồng bộ theo quy định của rơle.
Sau khi đóng các tiếp điểm của rơle KF1, cuộn dây của công tắc tơ K1 sẽ bật, các tiếp điểm của nó trong mạch chính sẽ làm ngắn mạch các điện trở khởi động Rp và stato sẽ bật đến điện áp toàn dòng. Khi các tiếp điểm mở của rơle KF2 được đóng lại, một mạch được tạo ra để cung cấp cho cuộn dây của công tắc tơ K2, độc lập với công tắc tơ K1, tiếp điểm của nó mở với tốc độ xấp xỉ 60% tốc độ đồng bộ.
Công tắc tơ K2 có hai cuộn dây: một cuộn dây chính, kéo KM1 và cuộn dây thứ hai KM2, được thiết kế để nhả khóa, được cung cấp cùng với công tắc tơ. Sau khi bật cuộn dây lấy KM1, các tiếp điểm đóng K2 đóng trong mạch kích thích và các tiếp điểm mở K2 mở, ngắt kết nối cuộn dây rôto khỏi các điện trở xả R1 và R2 và kết nối rôto với mạng DC.
Cơm. 3. Sơ đồ điều khiển động cơ đồng bộ
Các tiếp điểm của công tắc tơ K2 hoạt động theo thứ tự sau. Tiếp điểm N/O K2 mở trong mạch cung cấp của cuộn cảm ứng, nhưng tác động chặn giữ cho công tắc tơ được cấp điện. Các tiếp điểm đóng K2 đóng trong mạch cung cấp của hai cuộn dây và trong mạch của cuộn dây KM2, chuẩn bị mạch cho lần bật tiếp theo. Cuộn dây K2 sẽ bị ngắt điện ngay sau khi cơ chế khóa được giải phóng khỏi cuộn dây KM2. Động cơ được ngắt khỏi nguồn điện bằng cách nhấn nút SB1.Cuộn K1 nhả tiếp điểm mở của nó trong mạch của cuộn KM2, nhả chốt và tắt cuộn KM1, sau đó mạch trở về vị trí ban đầu.