Thiết bị kiểm soát tốc độ động cơ
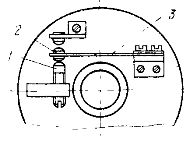
Động cơ điện không đồng bộ được sử dụng rộng rãi trong mạch hãm ngược dòng. rơle điều khiển tốc độ cảm ứng... Trục đầu vào của rơle 5, trên đó gắn một nam châm vĩnh cửu hình trụ 4, được nối với trục của động cơ điện, tốc độ góc của nó sẽ được điều khiển.
Khi động cơ điện quay, từ trường đi qua các dây của đoạn ngắn mạch 3 của stato quay 6. Một EMF được tạo ra trong cuộn dây, giá trị của nó tỷ lệ thuận với tốc độ góc quay của trục. Dưới ảnh hưởng của nó, một dòng điện xuất hiện trong cuộn dây và phát sinh lực tương tác có xu hướng làm quay stato 6 theo hướng quay của nam châm.
Ở một tốc độ quay nhất định, lực tăng lên rất nhiều đến mức bộ giới hạn 2, vượt qua lực cản của lò xo phẳng, làm tắc các tiếp điểm của rơle. Rơle được trang bị hai nút tiếp điểm: 1 và 7, được bật tùy thuộc vào hướng quay.
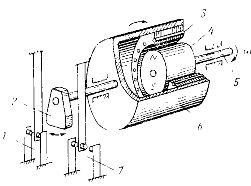
Hình 1. Rơle điều khiển tốc độ cảm ứng
Rơle điều khiển tốc độ cảm ứng có thiết kế khá phức tạp và độ chính xác thấp, chỉ có thể chấp nhận được đối với các hệ thống điều khiển thô sơ. Có thể đạt được độ chính xác điều chỉnh tốc độ cao hơn bằng cách sử dụng máy phát điện tốc độ - một máy siêu nhỏ đo lường, điện áp ở các cực tỷ lệ thuận với tốc độ quay.
Bộ tạo tacho được sử dụng trong các hệ thống phản hồi ổ đĩa tốc độ thay đổi với phạm vi vòng / phút rộng và do đó chỉ có một vài phần trăm sai số. Phổ biến nhất là máy phát điện DC.
Trong bộ lễ phục. 2 hiển thị sơ đồ của rơle điều khiển tốc độ cho động cơ điện M sử dụng bộ tạo tachogenerator G, mạch phần ứng bao gồm rơle điện từ K và bộ biến trở điều chỉnh R. Khi điện áp ở các cực phần ứng của bộ tạo tachogenerator vượt quá điện áp hoạt động, rơle được bật ở mạch ngoài.
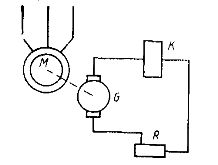
Hình 2. Rơle điều khiển tốc độ với tachogenerator
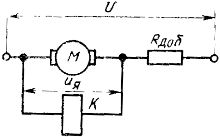
 Hình 3. Sơ đồ cầu máy đo tốc độ
Hình 3. Sơ đồ cầu máy đo tốc độ
Khi điện trở của mạch phần ứng tăng thì độ chính xác của mạch tăng. Do đó, đôi khi rơle được kết nối với máy phát điện thông qua bộ khuếch đại bán dẫn trung gian. Cũng có thể sử dụng các phần tử ngưỡng không tiếp xúc bán dẫn có điện áp đáp ứng ổn định cho mục đích này.
Độ tin cậy của mạch có thể được cải thiện nếu bộ tạo tốc độ DC được thay thế bằng bộ tạo tốc độ không đồng bộ không tiếp xúc.
Máy phát điện không đồng bộ có một rôto rỗng không từ tính được chế tạo dưới dạng thủy tinh. Stator có hai cuộn dây ở một góc 90 ° với nhau. Một trong các cuộn dây được kết nối với mạng điện xoay chiều.Một điện áp hình sin được loại bỏ khỏi cuộn dây khác, tỷ lệ thuận với tốc độ của rôto. Tần số của điện áp đầu ra luôn bằng tần số của nguồn điện lưới.
 Trong các động cơ DC Executive hiện đại, bộ tạo tốc độ được tích hợp vào cùng một vỏ với máy và được gắn trên cùng một trục với động cơ chính. Điều này làm giảm gợn điện áp đầu ra và cải thiện độ chính xác của việc điều chỉnh tốc độ.
Trong các động cơ DC Executive hiện đại, bộ tạo tốc độ được tích hợp vào cùng một vỏ với máy và được gắn trên cùng một trục với động cơ chính. Điều này làm giảm gợn điện áp đầu ra và cải thiện độ chính xác của việc điều chỉnh tốc độ.
Máy phát điện một chiều loại PT-1 với kích thích điện từ thường được sử dụng trong động cơ điện sê-ri PBST. Mô-men xoắn cao động cơ điện một chiều Tôi có một chiếc bánh tacho được kích thích bằng nam châm vĩnh cửu tích hợp sẵn.
Trong trường hợp động cơ DC M không có máy phát tốc, tốc độ của nó có thể được kiểm soát bằng cách đo EMF phần ứng. Đối với điều này, một mạch cầu đo tốc độ được sử dụng, được hình thành bởi hai điện trở: R1 và R2, phần ứng Ri và các cực bổ sung của máy Rdp. Điện áp đầu ra của cầu đo tốc độ Uout = U1 — Udp, hoặc
Uout = (Rdp / Rdp + Ri) x E = (Rdp / Rdp + Ri) x cω
Đẳng thức cuối đúng với điều kiện từ thông của động cơ điện không đổi. Bao gồm một phần tử ngưỡng ở đầu ra của cầu đo tốc độ, một rơle thu được được đặt ở một tốc độ quay nhất định. Độ chính xác của cầu máy đo tốc độ thấp do sự thay đổi của điện trở tiếp xúc chổi than và sự mất cân bằng nhiệt của điện trở.
Nếu động cơ DC đang hoạt động trên đặc tính nhân tạo và điện trở bổ sung lớn được bao gồm trong phần ứng, chức năng rơle tốc độ có thể được thực hiện bằng rơle điện áp được kết nối với các cực của phần ứng.
Hiệu điện thế ở phần ứng của động cơ điện Uja = E + IjaRja.
Vì I = (U — E) / (Ri + Rext), ta được Ui = (Rext / (Ri + Rext)) x E + (RI / (Ri + Rext)) x U, nên có thể bỏ qua số hạng thứ hai và điện áp đầu cực phần ứng có thể được coi là tỷ lệ thuận với emf và tốc độ quay của động cơ.
Hình 4. Điều khiển tốc độ bằng rơle điện áp
 Hình 5. Rơle điều khiển tốc độ ly tâm
Hình 5. Rơle điều khiển tốc độ ly tâm
Họ có một thiết kế rất đơn giản. công tắc tốc độ ly tâm... Cơ sở của rơle là một tấm mặt nhựa 4, được gắn trên một trục, tốc độ quay của nó phải được kiểm soát. Một lò xo phẳng 3 với tiếp điểm di động lớn 2 và tiếp điểm cố định có thể điều chỉnh 1 được cố định trên tấm trước Lò xo được làm bằng thép đặc biệt, mô đun đàn hồi của nó thực tế không phụ thuộc vào sự thay đổi nhiệt độ.
Khi tấm mặt quay, một lực ly tâm tác động lên tiếp điểm di động, lực này ở một tốc độ quay nhất định sẽ vượt qua lực cản của lò xo phẳng và chuyển đổi các tiếp điểm. Dòng điện được cung cấp cho thiết bị tiếp xúc thông qua các vòng trượt và chổi than, không được hiển thị trong hình. Rơle như vậy được sử dụng trong các hệ thống ổn định tốc độ cho vi động cơ DC. Mặc dù đơn giản, hệ thống vẫn duy trì tốc độ với sai số ở mức 2%.
