Sơ đồ điển hình để khởi động động cơ điện đồng bộ
Động cơ đồng bộ được sử dụng rộng rãi trong công nghiệp cho các bộ truyền động điện hoạt động ở tốc độ không đổi (máy nén, máy bơm, v.v.). Gần đây, do sự ra đời của công nghệ bán dẫn chuyển mạch, các bộ truyền động điện đồng bộ có điều khiển đã được phát triển.
Ưu điểm của động cơ đồng bộ
Động cơ đồng bộ phức tạp hơn một chút so với động cơ không đồng bộ, nhưng nó có một số ưu điểm khiến nó có thể được sử dụng trong một số trường hợp thay vì động cơ không đồng bộ.
1. Ưu điểm chính của động cơ điện đồng bộ là khả năng đạt được chế độ tối ưu cho năng lượng phản kháng, được thực hiện bằng cách tự động điều chỉnh dòng điện kích thích của động cơ. Một động cơ đồng bộ có thể hoạt động mà không tiêu thụ hoặc cung cấp năng lượng phản kháng cho mạng, ở hệ số công suất (cos fi) bằng đơn vị. Nếu doanh nghiệp cần tạo ra công suất phản kháng, thì một động cơ đồng bộ hoạt động quá mức có thể cung cấp nó cho lưới điện.
2.Động cơ đồng bộ ít nhạy cảm hơn với dao động điện áp nguồn so với động cơ không đồng bộ. Mô-men xoắn cực đại của chúng tỷ lệ với điện áp đường dây, trong khi mô-men xoắn tới hạn của động cơ cảm ứng tỷ lệ với bình phương điện áp.
3. Động cơ đồng bộ có khả năng quá tải cao. Ngoài ra, khả năng quá tải của động cơ đồng bộ có thể tự động tăng lên bằng cách tăng dòng điện kích thích, ví dụ, trong trường hợp tải trên trục động cơ tăng đột ngột trong thời gian ngắn.
4. Tốc độ quay của động cơ đồng bộ không thay đổi đối với bất kỳ tải trục nào trong khả năng chịu quá tải của nó.
Các phương pháp khởi động động cơ đồng bộ
Có thể thực hiện các phương pháp khởi động động cơ đồng bộ sau: khởi động không đồng bộ ở điện áp toàn dòng và khởi động ở điện áp thấp thông qua cuộn kháng hoặc biến áp tự ngẫu.
Khởi động động cơ đồng bộ được thực hiện như khởi động không đồng bộ. Mô-men xoắn khởi động bên trong của máy đồng bộ nhỏ, trong khi mô-men xoắn của máy cực ngầm bằng không. Để tạo mô-men xoắn không đồng bộ, rôto được trang bị lồng khởi động lồng sóc, các thanh được lắp vào các rãnh của hệ thống cực. (Tất nhiên, không có thanh giữa các cực trong động cơ có cực lồi.) Cũng chính tế bào này góp phần tăng tính ổn định động của động cơ khi tải tăng đột biến.
Do mô-men xoắn không đồng bộ, động cơ khởi động và tăng tốc. Không có dòng điện kích thích trong cuộn dây rôto trong quá trình tăng tốc.Máy khởi động không bị kích thích, vì sự có mặt của các cực bị kích thích sẽ làm phức tạp quá trình tăng tốc, tạo ra mômen hãm tương tự như mômen hãm của động cơ cảm ứng trong quá trình hãm động năng.
Khi cái gọi là Tốc độ đồng bộ, khác với đồng bộ từ 3 - 5%, dòng điện được cung cấp cho cuộn dây kích thích và động cơ, sau một số dao động xung quanh vị trí cân bằng, sẽ bị hút vào đồng bộ. Các động cơ có cực tiếp xúc, do mô-men xoắn phản kháng ở mô-men xoắn trục thấp, đôi khi được đưa vào đồng bộ mà không cung cấp dòng điện cho cuộn kích từ.
Trong động cơ đồng bộ, rất khó để cung cấp đồng thời các giá trị yêu cầu của mômen khởi động và mômen đầu vào, được hiểu là mômen không đồng bộ phát triển khi tốc độ đạt 95% tốc độ đồng bộ. Theo bản chất của sự phụ thuộc của mô-men xoắn tĩnh vào tốc độ, tức là phù hợp với loại cơ chế mà động cơ được thiết kế, các thông số của ô khởi động phải được thay đổi trong các nhà máy sản xuất máy điện.
Đôi khi, để hạn chế dòng điện khi khởi động động cơ mạnh, điện áp ở các đầu của stato bị giảm, bao gồm cả các cuộn dây của máy biến áp tự ngẫu hoặc điện trở nối tiếp. Cần lưu ý rằng khi khởi động động cơ đồng bộ, mạch của cuộn dây kích thích được đóng lại với điện trở lớn, vượt quá điện trở của chính cuộn dây từ 5-10 lần.
Mặt khác, dưới tác động của dòng điện cảm ứng trong cuộn dây khi khởi động, sẽ xảy ra từ thông dao động, thành phần ngược lại của nó, tương tác với dòng điện stato, tạo ra mômen hãm.Mô-men xoắn này đạt giá trị cực đại ở tốc độ hơi cao hơn một nửa so với tốc độ danh nghĩa và dưới ảnh hưởng của nó, động cơ có thể dừng tăng tốc ở tốc độ này. Để mạch trường mở trong khi khởi động rất nguy hiểm vì lớp cách điện của cuộn dây có thể bị hỏng do EMF gây ra trong đó.
Phim cuộn giáo dục - "Động cơ đồng bộ" do Xí nghiệp Tư liệu Giáo dục sản xuất năm 1966. Bạn có thể xem nó ở đây: Phim đèn chiếu «Động cơ đồng bộ»

Khởi động không đồng bộ của động cơ điện đồng bộ
Mạch kích thích của động cơ đồng bộ với bộ kích thích được kết nối mù khá đơn giản và có thể được sử dụng nếu dòng khởi động không gây ra sụt áp trong mạng nhiều hơn mức cho phép và mô-men xoắn thống kê Ms <0,4 Mnom.
Khởi động không đồng bộ của động cơ đồng bộ được thực hiện bằng cách kết nối stato với mạng. Động cơ được tăng tốc như một động cơ cảm ứng đến tốc độ quay gần với tốc độ đồng bộ.
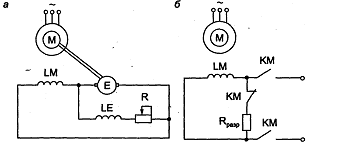
Trong quá trình khởi động không đồng bộ, cuộn dây kích thích được đóng vào điện trở phóng điện để tránh phá hủy cuộn dây kích thích trong quá trình khởi động, vì ở tốc độ rôto thấp, quá điện áp đáng kể có thể xảy ra trong đó. Ở tốc độ quay gần bằng đồng bộ, công tắc tơ KM được kích hoạt (mạch cung cấp của công tắc tơ không được hiển thị trong sơ đồ), cuộn dây kích thích được ngắt khỏi điện trở xả và được nối với phần ứng của bộ kích thích. Sự khởi đầu kết thúc.
 Các Đơn Vị Điển Hình Của Mạch Kích Thích Động Cơ Đồng Bộ Sử Dụng Bộ Kích Thích Thyristor Để Khởi Động Động Cơ Đồng Bộ
Các Đơn Vị Điển Hình Của Mạch Kích Thích Động Cơ Đồng Bộ Sử Dụng Bộ Kích Thích Thyristor Để Khởi Động Động Cơ Đồng Bộ
Điểm yếu của hầu hết các bộ truyền động điện với động cơ đồng bộ, làm phức tạp quá trình vận hành và tăng chi phí, là yếu tố kích thích của máy điện trong nhiều năm. Ngày nay chúng được sử dụng rộng rãi để kích thích động cơ đồng bộ. máy kích thích thyristor… Chúng được cung cấp theo bộ.
Bộ kích thích thyristor của động cơ điện đồng bộ đáng tin cậy hơn và có hiệu suất cao hơn. so với máy kích thích máy điện. Với sự giúp đỡ của họ, các câu hỏi về quy định tối ưu của dòng điện kích thích để duy trì sự không đổi có thể dễ dàng giải quyết. cos phi, điện áp của các thanh cái mà từ đó động cơ đồng bộ được cung cấp, cũng như giới hạn dòng điện rôto và stato của động cơ đồng bộ trong các chế độ khẩn cấp.
Máy kích thích thyristor được trang bị hầu hết các động cơ điện đồng bộ lớn được sản xuất. Chúng thường thực hiện các chức năng sau:
- khởi động động cơ đồng bộ với điện trở khởi động được bao gồm trong mạch cuộn dây trường,
- tắt điện trở khởi động không tiếp xúc sau khi kết thúc khởi động động cơ đồng bộ và bảo vệ nó khỏi quá nhiệt,
- tự động cung cấp kích thích tại thời điểm thích hợp để khởi động động cơ điện đồng bộ,
- tự động và điều chỉnh thủ công dòng điện kích thích
- kích thích cưỡng bức cần thiết trong trường hợp điện áp giảm sâu trên stato và tải đột ngột nhảy lên trục của động cơ đồng bộ,
- dập tắt nhanh trường của động cơ đồng bộ khi cần giảm dòng kích từ và tắt động cơ điện,
- bảo vệ rôto của động cơ đồng bộ chống quá dòng và ngắn mạch liên tục.
Nếu động cơ điện đồng bộ được khởi động ở điện áp giảm, thì khi khởi động «nhẹ», nó được kích thích cho đến khi cuộn dây stato bật ở điện áp đầy đủ và khi khởi động «nặng», kích thích được cung cấp ở điện áp đầy đủ trong mạch stato. Có thể nối cuộn dây trường động cơ với phần ứng của máy kích thích nối tiếp với điện trở xả.
Quá trình cung cấp kích thích cho động cơ đồng bộ được tự động hóa theo hai cách: theo chức năng của tốc độ và theo chức năng của dòng điện.
Hệ thống kích từ và thiết bị điều khiển động cơ đồng bộ phải có:
- khởi động, đồng bộ hóa và dừng động cơ (với kích thích tự động khi kết thúc khởi động);
- kích thích cưỡng bức với hệ số không nhỏ hơn 1,4 khi điện áp nguồn giảm xuống 0,8Un;
- khả năng động cơ bù công suất phản kháng tiêu thụ (được cung cấp) bởi các máy thu điện liền kề trong khả năng nhiệt của động cơ;
- dừng động cơ trong trường hợp hỏng hóc trong hệ thống kích thích;
- ổn định dòng kích thích với độ chính xác 5% giá trị cài đặt khi điện áp lưới thay đổi từ 0,8 đến 1,1;
- điều chỉnh kích thích bằng độ lệch của điện áp stato với vùng chết là 8%;
- khi điện áp cung cấp cho stato của động cơ đồng bộ thay đổi từ 8 đến 20%, dòng điện thay đổi từ giá trị đặt thành 1,4 In, làm tăng dòng điện kích thích để đảm bảo quá tải động cơ tối đa.
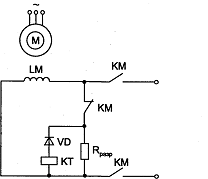
Trong sơ đồ thể hiện trong hình, kích thích được cung cấp cho động cơ đồng bộ sử dụng rơle điện từ một chiều KT (Rơle thời gian bọc).Cuộn dây rơle được kết nối với điện trở xả Rdisc thông qua diode VD. Khi cuộn dây stato được kết nối với nguồn điện, một emf được tạo ra trong cuộn dây kích thích của động cơ. Dòng điện một chiều chạy qua cuộn dây của rơle KT, biên độ và tần số của các xung phụ thuộc vào độ trượt.
 Kích thích cung cấp cho động cơ đồng bộ tùy thuộc vào tốc độ
Kích thích cung cấp cho động cơ đồng bộ tùy thuộc vào tốc độ
Khi khởi động, trượt S = 1. Khi động cơ tăng tốc, nó giảm và khoảng thời gian giữa các nửa sóng đã hiệu chỉnh của dòng điện tăng lên; từ thông giảm dần dọc theo đường cong Ф(t).
Ở tốc độ gần đồng bộ, từ thông của rơle có thể đạt đến giá trị của từ thông ngắt rơle Fot tại thời điểm dòng điện không đi qua rơle KT. Rơle mất điện và thông qua tiếp điểm của nó tạo ra mạch nguồn của công tắc tơ KM (sơ đồ công tắc tơ KM không thể hiện trong sơ đồ).
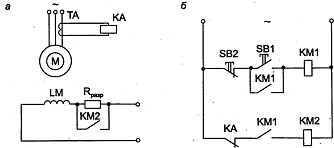
Xem xét việc kiểm soát nguồn điện trong chức năng dòng điện bằng cách sử dụng rơle dòng điện. Với dòng điện khởi động, rơle dòng điện KA được kích hoạt và mở tiếp điểm của nó trong mạch của công tắc tơ KM2.
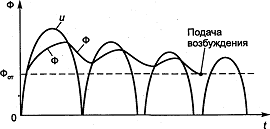
Đồ thị biến thiên dòng điện và từ thông trong rơle thời gian KT
 Theo dõi sự kích thích của động cơ đồng bộ như là một chức năng của dòng điện
Theo dõi sự kích thích của động cơ đồng bộ như là một chức năng của dòng điện
Ở tốc độ gần đồng bộ, rơle KA biến mất và đóng tiếp điểm của nó trong mạch công tắc tơ KM2. Công tắc tơ KM2 kích hoạt, đóng tiếp điểm của nó trong mạch kích thích máy và ngắt điện trở Rres.