Các loại mạch chuyển tiếp
Hệ thống chuyển tiếp chiếm một vị trí nổi bật trong số nhiều thiết bị điều khiển tự động. Tính năng đặc trưng của chúng là sự thay đổi mạnh trong giá trị (đầu ra) được kiểm soát khi giá trị đầu vào thay đổi. Nói cách khác, mỗi phần tử của hệ thống chuyển tiếp chỉ có thể đảm nhận hai trạng thái: «bật» hoặc «tắt». Điển hình và phổ biến nhất là các mạch chuyển tiếp bao gồm tiếp xúc với các phần tử điện từ (rơle).
Theo tính chất công việc, hệ thống rơle được chia thành một chu kỳ và nhiều chu kỳ.
Trong các hệ thống vòng lặp đơn, trạng thái của các ổ đĩa được xác định duy nhất bởi trạng thái của các phần tử nhận tại bất kỳ thời điểm nào. Không có trình tự rõ ràng trong hành động của họ và do đó không cần các yếu tố trung gian. Nói cách khác, trong hệ thống một vòng lặp, một sự kết hợp nhất định của các tín hiệu đầu vào (đối số) tương ứng với một giá trị nhất định của đại lượng (hàm) đầu ra. Khi mô tả sơ đồ của các hệ thống như vậy, không thể sử dụng các khái niệm «trước», «sau», «tạm biệt», v.v., đặc trưng cho trình tự nhập các đối số.
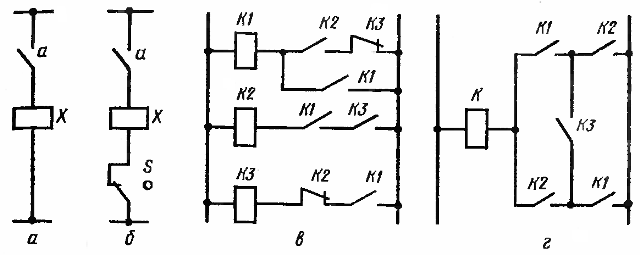
Cơm. 1.Các loại mạch chuyển tiếp: a — một chu kỳ, b — nhiều chu kỳ, c — loại P, d — loại H.
Ví dụ, trong mạch đơn thể hiện trong Hình 1, a, hoạt động của bộ truyền động X phụ thuộc duy nhất vào hoạt động của phần tử nhận — tiếp điểm đóng a. Không có yếu tố trung gian ở đây.
Trong các hệ thống nhiều chu kỳ, một trình tự nhất định được cung cấp trong công việc của các phần tử tiếp nhận và điều hành, để thực hiện chúng cần có sự hiện diện của các phần tử trung gian. Do đó, một số hàm có thể khớp với các đối số của cùng một tổ hợp, nhưng theo dữ liệu tại các thời điểm khác nhau.
Vì vậy, trong mạch của Hình 1, b, hoạt động của bộ truyền động X được xác định không chỉ bởi hoạt động của phần tử nhận - tiếp điểm đóng a, mà còn bởi phần tử trung gian S.
Hình ảnh sơ đồ của hệ thống rơle, hiển thị số lượng và thành phần của các phần tử cấu trúc, cũng như cấu hình của các kết nối giữa các phần tử, được gọi là cấu trúc mạch rơle. Phần của mạch rơle chỉ chứa các tiếp điểm được gọi là mạch tiếp điểm.
Thông thường, cấu trúc của các mạch chuyển tiếp được mô tả bằng đồ họa dưới dạng ký hiệu của các phần tử và kết nối của chúng. Mỗi phần tử đồ họa của mạch nhận được một ký hiệu chữ cái.
Theo GOST, các cuộn dây tiếp điểm, bộ khởi động từ, rơle được ký hiệu bằng chữ K. Nếu có một số phần tử trong mạch, thì một số tương ứng với số sê-ri của phần tử trên sơ đồ sẽ được thêm vào ký hiệu chữ cái. Bạn có thể sử dụng ký hiệu hai chữ cái: ví dụ: các cuộn dây của công tắc tơ, bộ khởi động từ được ký hiệu là KM, rơle thời gian KT, rơle điện áp KV, rơle dòng điện KA, v.v.Các tiếp điểm của các phần tử có cùng ký hiệu như các cuộn dây. Ví dụ: K4 là rơle thứ tư và tất cả các tiếp điểm của rơle này sẽ có cùng một ký hiệu.
Theo loại kết nối, có các mạch song song (loại P) và với các kết nối cầu (loại H). Trong các mạch loại P (Hình 1, c), các tiếp điểm và cuộn dây của các phần tử khác nhau được mắc nối tiếp với nhau và các mạch riêng lẻ mắc song song. Trong các mạch loại H (Hình 1, d), sự hiện diện của các phần tử cầu (phần tử ngắn mạch) dẫn đến các kết nối nối tiếp và song song đồng thời trong các mạch khác nhau. Mạch cầu có ít tiếp điểm hơn đáng kể so với mạch loại P.

Khi nghiên cứu hệ thống tự động hóa rơ le chủ yếu giải quyết 2 vấn đề:
-
đầu tiên là phân tích các mạch rơle, nghĩa là xác định các điều kiện hoạt động của từng rơle và trình tự hoạt động của chúng,
-
thứ hai - để tổng hợp các sơ đồ, nghĩa là tìm ra cấu trúc của mạch theo các điều kiện hoạt động nhất định của nó.
Phân tích và tổng hợp giúp có được sơ đồ điện của hệ thống với số lượng rơle và tiếp điểm tối thiểu có thể. Khi nghiên cứu trạng thái đứng yên của các phần tử riêng lẻ của hệ thống tự động hóa rơle, mà không tính đến hành vi của chúng theo thời gian, một thiết bị toán học đặc biệt được sử dụng rộng rãi - cái gọi là đại số logic.