Sơ đồ điều khiển tự động cho hai tổ máy bơm
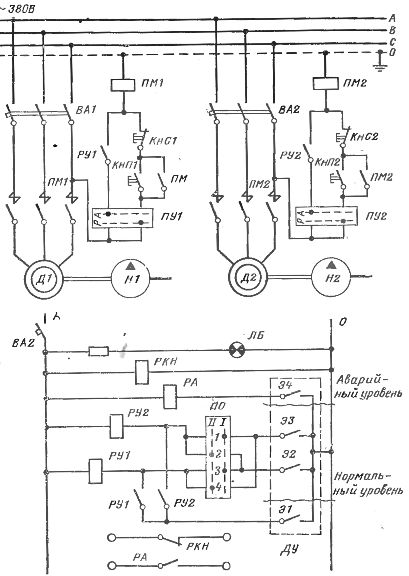
 Hình này cho thấy sơ đồ điều khiển tự động của hai tổ máy bơm hoạt động mà không có người trực.
Hình này cho thấy sơ đồ điều khiển tự động của hai tổ máy bơm hoạt động mà không có người trực.
Hoạt động của mạch dựa trên nguyên tắc khởi động và dừng máy bơm, tùy thuộc vào mức chất lỏng trong bể được kiểm soát mà từ đó quá trình bơm được thực hiện. Sử dụng để kiểm soát việc đổ đầy bình chứa chất lỏng cảm biến mức điện cực DU. Trong hai tổ máy bơm, một tổ máy đang chạy và tổ máy còn lại ở chế độ chờ.
Chế độ hoạt động của các khối được thiết lập công tắc điều khiển (Công tắc bơm SW): ở vị trí 1 của công tắc, bơm H1 với động cơ D1 sẽ chạy và bơm H2 với động cơ D2 sẽ ở chế độ chờ, chế độ này sẽ được kích hoạt nếu công suất của bơm H1 không đủ. Ở vị trí 1, bơm làm việc là H2 và bơm dự phòng là H2.
Xét hoạt động của mạch khi công tắc phần mềm đặt ở vị trí 1 và công tắc PU1, PU2 ở vị trí A, tức là điều khiển bơm tự động.Tiếp điểm 1 và 3 của công tắc PO đóng các mạch của cuộn dây rơle RU1 và RU2, nhưng rơle sẽ không bật, vì ở mức chất lỏng bình thường, các điện cực E2 và EZ của cảm biến mức điều khiển từ xa vẫn mở.
Mạch tự động điều khiển hai bơm hút chân không
Khi mức chất lỏng trong bình chứa dâng lên đến điện cực E2 thì mạch cuộn dây đóng lại rơle trung gian RU1, nó được kích hoạt và thông qua tiếp điểm đóng RU1 được cung cấp cho cuộn dây khởi động PM1. Động cơ D1 bật và bơm H1 bắt đầu bơm.
Mức chất lỏng trong bình giảm, nhưng khi tiếp điểm E2 bị đứt, động cơ D1 sẽ không dừng, vì cuộn dây rơle RU1 tiếp tục nhận năng lượng thông qua tiếp điểm RU1 của nó và tiếp điểm đóng của điện cực E1. Việc chặn rơle RU1 như vậy được sử dụng để tránh khởi động và dừng bơm thường xuyên với những thay đổi nhỏ về mức chất lỏng và đảm bảo rằng bơm chỉ tắt khi mức chất lỏng giảm xuống dưới mức bình thường và tiếp điểm E1 mở ra.
Nếu máy bơm đang hoạt động dừng khẩn cấp hoặc hiệu suất của nó không đủ, mức chất lỏng trong bể sẽ tiếp tục tăng. Khi nó đến điện cực EZ của cảm biến điều khiển từ xa, cuộn dây rơle RU2 sẽ được cấp điện. Rơle sẽ hoạt động và bật bộ khởi động từ PM2, động cơ bơm dự phòng D2 sẽ bật. Thiết bị ở chế độ chờ sẽ tắt khi mức chất lỏng giảm xuống dưới điện cực A1.
Nếu vì lý do nào đó có một lượng lớn chất lỏng chảy vào bể, thì công việc của cả hai bộ phận bơm có thể không đủ và chất lỏng sẽ tăng lên mức tối đa cho phép mà điện cực E4 được lắp đặt. Điều này sẽ đóng mạch cuộn dây của rơle PA, sẽ hoạt động và với tiếp điểm đóng của nó sẽ kích hoạt mạch cảnh báo, thông báo cho nhân viên về hoạt động bất thường của các bộ phận bơm.
Rơle điều khiển điện áp RKN được sử dụng để cung cấp tín hiệu cảnh báo trong trường hợp mất điện áp trong mạch điều khiển. Các mạch báo động được cung cấp bởi một nguồn điện độc lập. Đèn tín hiệu màu trắng LU dùng để cảnh báo về sự hiện diện của điện áp trong các mạch điều khiển trong quá trình kiểm tra điều khiển thiết bị.
Việc chuyển đổi sang điều khiển thủ công (cục bộ) của các bộ phận bơm được thực hiện bằng cách chuyển các công tắc PU1 và PU2 sang vị trí P. Động cơ D1 hoặc D2 được bật và tắt bằng cách nhấn các nút KnP1 và KnS1 hoặc KnP2 và KnS2 nằm trực tiếp trên các đơn vị máy bơm.
Xem thêm: Lựa chọn công suất của động cơ điện của bộ phận bơm