Sơ đồ điều khiển truyền động điện từ nhiều địa điểm
 Đối với các dây chuyền xử lý liên tục, trong đó các bộ truyền động chủ yếu hoạt động theo một hướng (thuận) và rất hiếm khi đảo ngược, nên sử dụng mạch (Hình 1) có bao gồm một công tắc tơ đường dây để vận hành "thuận" thông qua bộ ngắt và cho hoạt động "đảo ngược" — thông qua các tiếp điểm khởi động của công tắc tơ KMR. Sự sắp xếp này giúp giảm thời gian bắt đầu truyền động theo hướng ưu tiên.
Đối với các dây chuyền xử lý liên tục, trong đó các bộ truyền động chủ yếu hoạt động theo một hướng (thuận) và rất hiếm khi đảo ngược, nên sử dụng mạch (Hình 1) có bao gồm một công tắc tơ đường dây để vận hành "thuận" thông qua bộ ngắt và cho hoạt động "đảo ngược" — thông qua các tiếp điểm khởi động của công tắc tơ KMR. Sự sắp xếp này giúp giảm thời gian bắt đầu truyền động theo hướng ưu tiên.
Sơ đồ trong hình. 2 cho phép điều khiển đảo ngược từ xa động cơ điện từ một vật thể chuyển động. Ví dụ, mạch này được sử dụng để điều khiển các động cơ của nắp giếng sưởi từ cần trục. Các mạch tín hiệu và tiếp nhận các tín hiệu khác nhau được hiển thị trong Hình. 3—9.
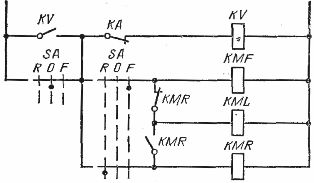
Cơm. 1. Sơ đồ điều khiển động cơ phía sau với «phía sau» phía sau hiếm.
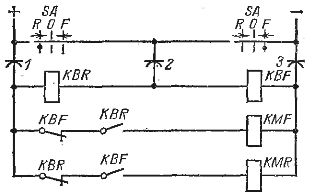
Cơm. 2. Sơ đồ điều khiển đảo chiều động cơ bằng bộ điều khiển.
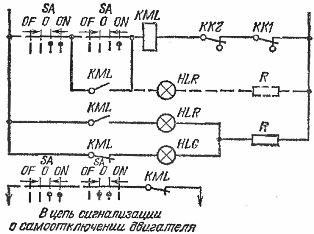
Cơm. 3. Sơ đồ báo hiệu trạng thái truyền động điện không đảo chiều.
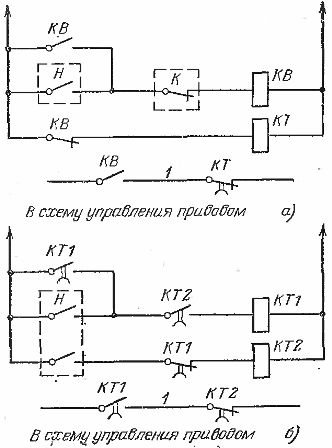
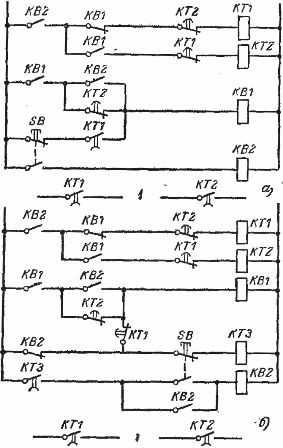
Cơm. 4.Mạch nhận tín hiệu có độ trễ sau khi bắt đầu tiếp xúc với tín hiệu dài (a) và xung (b): K — tiếp điểm mở khóa, 1 — tiếp điểm với mạch điều khiển của biến tần.
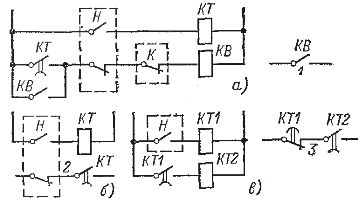
Cơm. 5. Sơ đồ nhận tín hiệu sau khi kết thúc nhịp (từ đuôi) của tín hiệu H dài (a), xung (b), xung có độ trễ thời gian (c). K — tiếp điểm mở khóa, 1, 2, 3 — tiếp điểm nối với mạch điều khiển truyền động.
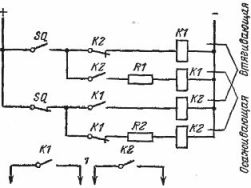
Cơm. 6. Sơ đồ nhận tín hiệu dài sau đầu H thứ cấp.
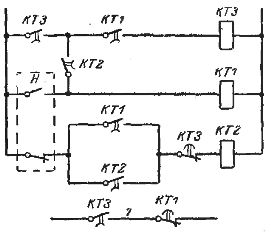
Cơm. 7. Sơ đồ nhận tín hiệu xung có độ trễ thời gian sau tác động thứ cấp của tín hiệu H (KT1 là 0,2-0,8 giây; KT2 0,3 giây; KTZ 0,5 giây). 1 — các điểm tiếp xúc với mạch điều khiển truyền động.
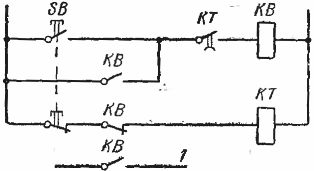
Cơm. 8. Sơ đồ nhận tín hiệu trong một khoảng thời gian nhất định, bất kể thời gian nhấn nút: 1 — tiếp xúc với mạch điều khiển truyền động.
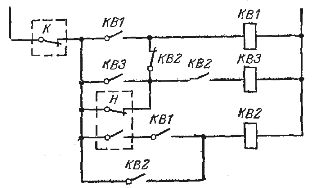
Sơ đồ đếm được sử dụng để tự động tác động đến biến tần sau khi đếm một số hoạt động hoặc chu kỳ nhất định. Chúng có thể đếm số lần đóng và mở (Hình 10), chỉ lần đóng (Hình 11) hoặc chỉ lần mở (Hình 12).
Các xung đếm theo các sơ đồ đã chỉ định được cung cấp từ các tiếp điểm rơle ảnh, công tắc chuyển động hoặc các thiết bị khác.
Trong sơ đồ đếm được hiển thị trong hình. 10, Rơle REV850 được sử dụng với phần ứng "dính" từ tính, và do đó, việc gián đoạn nguồn cung cấp điện áp cho mạch này không làm phiền quá trình đếm. Trong các mạch đếm khác, khi nguồn điện áp bị gián đoạn, số xung sẽ bị mất.
Để kiểm tra tính hợp lệ của lược đồ tài khoản (Hình 11), nút điều khiển… Mỗi lần bạn nhấn nút SB0N, mạch sẽ thực hiện một lần đếm. Nút SB0F được sử dụng để đặt lại bộ đếm.Các nút như vậy cũng có thể được cung cấp trong các sơ đồ khác.
Cơm. 9. Mạch nhận tín hiệu ở hai mạch khác nhau bằng cách nhấn liên tiếp một nút: a — thời lượng tín hiệu bằng thời lượng nhấn nút, b — thời lượng tín hiệu không phụ thuộc vào thời lượng nhấn nút , 1 — các điểm tiếp xúc với mạch điều khiển truyền động.
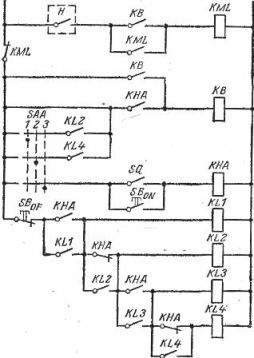
Cơm. 10. Đề án của tài khoản lên đến hai.
Các xung cho mỗi số là một lần đóng và một lần mở tiếp điểm của công tắc hành trình SQ; 1 — các điểm tiếp xúc với mạch điều khiển truyền động.
Đếm xung trong các mạch của hình. 11, 12 là các lần đóng (mở) ngắn hạn của tiếp điểm SQ và trạng thái đóng của tiếp điểm này phải đủ để bật công tắc tơ xung KNA và một rơle KB (KL).
Cơm. 11. Sơ đồ đếm đến ba khi đóng tiếp điểm SQ.
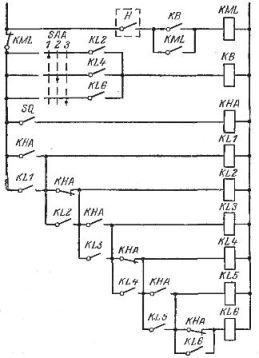
Cơm. 12. Sơ đồ đếm đến ba khi mở tiếp điểm SQ
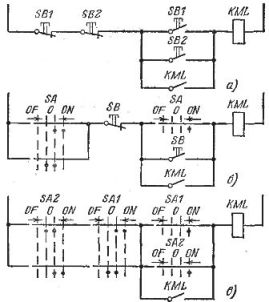
Cơm.13. Sơ đồ điều khiển động cơ không thể đảo ngược từ hai nơi: a — bằng hai nút, b — bằng nút và phím, c — bằng hai phím.
Cơm. 14. Sơ đồ điều khiển đảo chiều phụ thuộc một phía của truyền động điện từ hai nơi.
Số đếm được đặt lại bởi công tắc dòng KML; thời gian đóng của công tắc tơ SQ phải nhỏ hơn thời gian đóng của công tắc tơ KML.
Các sơ đồ đếm cho số lượng lớn hơn một chút có thể được tạo ra bằng cách tương tự với các sơ đồ trên, nhưng khi số đếm nhiều hơn năm hoặc tám hoặc trong trường hợp không thể chấp nhận việc mất đếm khi mất điện áp, thì nên sử dụng các sơ đồ được đánh số. rơ le.
Cơm. 15. Sơ đồ điều khiển động cơ thuận nghịch phụ thuộc: a — từ hai vị trí, b — từ ba vị trí
Có thể sử dụng rơle đếm bước động cơ loại E-526 cho tối đa 30 lần đếm hoặc rơle đếm xung loại E 531 với số đếm xung lên tới 75. Các rơle hoạt động trên dòng điện xoay chiều và các tiếp điểm của chúng cho phép ngắt nguồn ở 220 V AC tương ứng và DC 50 và 30 watt.
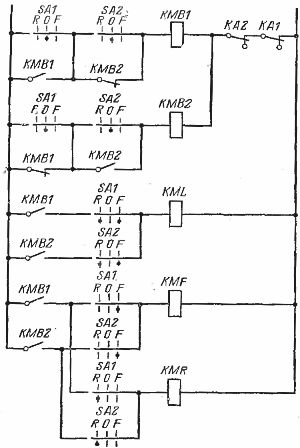
Các mạch điều khiển của động cơ điện từ nhiều nơi có thể phụ thuộc, phụ thuộc một chiều và độc lập (Hình 13). Thông thường, các sơ đồ điều khiển phụ thuộc (Hình 15) được sử dụng là đơn giản nhất. Theo các sơ đồ này, khi vận hành bất kỳ thiết bị điều khiển nào, việc di chuyển tay cầm của thiết bị khác từ 0 sang vị trí vận hành sẽ khiến động cơ dừng lại.
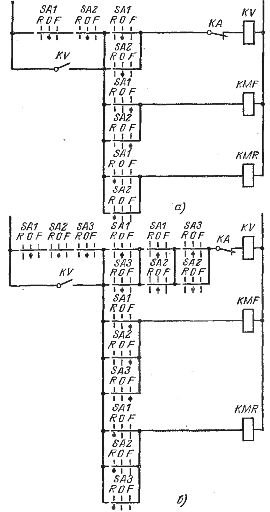
Theo sơ đồ điều khiển phụ thuộc một chiều từ hai (Hình 14) và ba (Hình 16), công tắc SA1 có thể được điều khiển độc lập với vị trí của công tắc SA2 (SA2 và SA3). Có thể điều khiển công tắc SA2 khi công tắc SA1 ở vị trí 0 và không phụ thuộc vào vị trí của công tắc SA3. Có thể điều khiển công tắc SA3 khi công tắc SA1 và SA2 ở vị trí 0.
Hình 16. Sơ đồ điều khiển phụ thuộc một chiều của động cơ pittông ba vị trí
Cơm. 17. Sơ đồ điều khiển động cơ đảo chiều độc lập từ hai nơi.
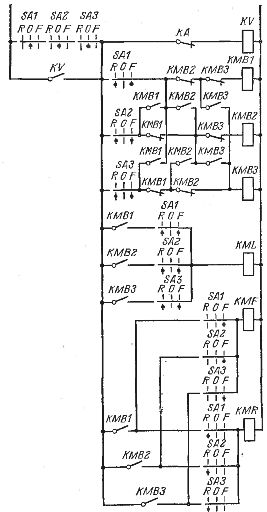
Cơm. 18. Sơ đồ điều khiển động cơ đảo chiều độc lập ba vị trí.
Trong sơ đồ điều khiển độc lập (Hình 17 và 18), khi biến tần được điều khiển bởi bất kỳ công tắc đầu tiên nào (SA1, SA2 hoặc SA3), việc di chuyển tay cầm của công tắc kia không ảnh hưởng đến hoạt động của biến tần. Sau khi tay cầm của phím thứ nhất trở về vị trí 0, bộ truyền động sẽ dừng bất kể vị trí của tay cầm của phím thứ hai (hoặc hai phím khác). Chỉ có thể bắt đầu lại sau khi đưa phím thứ hai (hoặc hai phím khác) về vị trí 0.
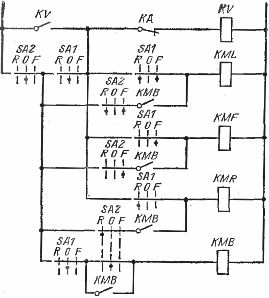
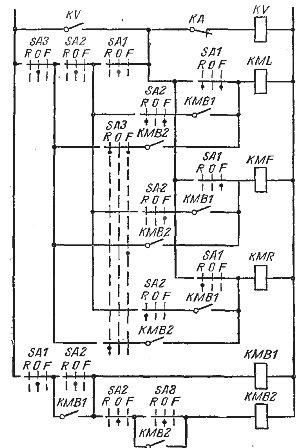
Rất thường xuyên, họ sử dụng điều khiển ổ đĩa từ hai và ba vị trí theo sơ đồ đơn giản hóa (Hình 19); điều này có nghĩa là kiểm soát ưu tiên chỉ từ một vị trí đầu tiên (khóa SA1). Khi biến tần được điều khiển bởi một công tắc khác (SA2 hoặc SA3), việc di chuyển tay cầm của công tắc đầu tiên từ vị trí 0 sẽ khiến điều khiển được chuyển sang công tắc đó.
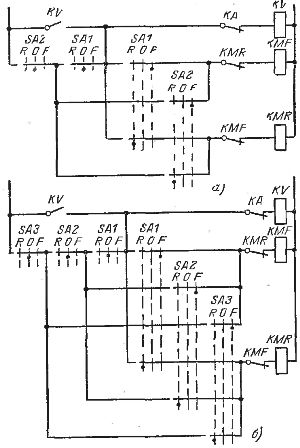
Cơm. 19. Sơ đồ đơn giản hóa điều khiển truyền động điện đảo chiều: a — từ hai vị trí, b — từ ba vị trí.