Cảm biến không tiếp xúc cho vị trí của các cơ chế
 Trong bài viết này, chúng ta sẽ nói về cảm biến vị trí của cơ chế. Về cơ bản, chức năng chính của bất kỳ cảm biến nào là đưa ra tín hiệu khi một sự kiện cụ thể xảy ra. Nghĩa là, khi một sự kiện kích hoạt xảy ra, cảm biến được kích hoạt và tạo ra tín hiệu, có thể là tín hiệu tương tự hoặc rời rạc, kỹ thuật số.
Trong bài viết này, chúng ta sẽ nói về cảm biến vị trí của cơ chế. Về cơ bản, chức năng chính của bất kỳ cảm biến nào là đưa ra tín hiệu khi một sự kiện cụ thể xảy ra. Nghĩa là, khi một sự kiện kích hoạt xảy ra, cảm biến được kích hoạt và tạo ra tín hiệu, có thể là tín hiệu tương tự hoặc rời rạc, kỹ thuật số.
Cảm biến giới hạn đã được sử dụng làm cảm biến vị trí trong nhiều thập kỷ. công tắc. Chúng bao gồm các tiếp điểm điện mở hoặc đóng cơ học khi một số biến (vị trí) đạt đến một giá trị nhất định. Công tắc giới hạn các loại là một phần quan trọng của nhiều hệ thống điều khiển, độ tin cậy của chúng phụ thuộc vào chúng. các cảm biến như vậy chứa các phần tử cơ học chuyển động có nguồn lực hạn chế.
Các công tắc giới hạn hiện đang được thay thế tích cực bằng các cảm biến tiệm cận khác nhau. Hầu hết các cảm biến tiệm cận thuộc các loại sau: cảm ứng, máy phát điện, nam châm và quang điện tử. Các cảm biến này không có tiếp xúc cơ học với đối tượng chuyển động có vị trí đang được theo dõi.
Cảm biến vị trí không tiếp xúc đảm bảo tốc độ cao và tần suất bật cơ chế cao. Một nhược điểm nhất định của các cảm biến này là sự phụ thuộc, độ chính xác của chúng vào những thay đổi về điện áp nguồn và nhiệt độ. Tùy thuộc vào yêu cầu, thiết bị đầu ra của các thiết bị này có thể như sau phần tử logic không tiếp xúcVà rơle điện.
Trong các sơ đồ phanh chính xác của truyền động điện, cảm biến tiệm cận có thể được sử dụng để ra lệnh giảm số và dừng lần cuối.
Có rất nhiều loại cảm biến trên thị trường hiện nay, nhưng trong khuôn khổ bài viết này, chúng tôi sẽ làm nổi bật chủ đề cảm biến vị trí quy nạp trực tiếp, vì trong hơn 80% trường hợp, cảm biến quy nạp đóng vai trò là cảm biến cho vị trí của các cơ chế.
Cảm biến điện cảm được kích hoạt khi kim loại tiếp cận vùng kích hoạt của nó. Vì lý do này, cảm biến vị trí cảm ứng còn được gọi là cảm biến hiện diện, cảm biến tiệm cận hoặc đơn giản là công tắc cảm ứng.
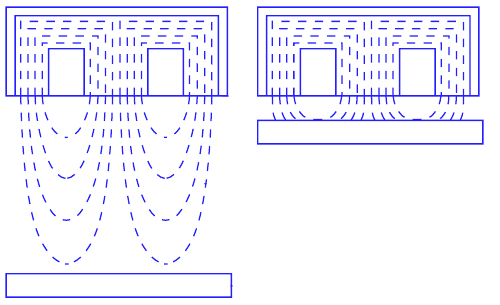
Bây giờ chúng ta hãy xem xét nguyên tắc hoạt động của một cảm biến điện cảm. Như đã đề cập ở trên, khi kim loại đủ gần vùng kích hoạt, cảm biến sẽ được kích hoạt. Hiện tượng này bao gồm trong sự tương tác của các liên quan cuộn cảm với kim loại tiếp cận nó, làm thay đổi mạnh độ lớn của từ trường của cuộn dây, dẫn đến kích hoạt cảm biến, nó được kích hoạt, tín hiệu tương ứng xuất hiện ở đầu ra của nó.
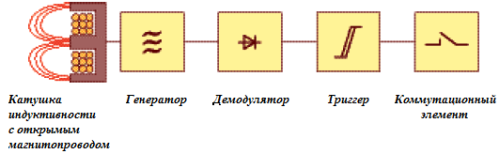
Phần điện tử của thiết bị chứa một mạch điều khiển, từ đó điều khiển một công tắc rơle hoặc bóng bán dẫn. Nó bao gồm các phần sau:
-
Một máy phát tạo ra một trường điện từ cần thiết để tương tác với một đối tượng.
-
Bộ kích hoạt Schmitt cung cấp độ trễ chuyển mạch.
-
Một bộ khuếch đại để tăng biên độ của tín hiệu để nó đạt đến giá trị truyền động cần thiết.
-
Đèn LED thông báo về trạng thái của công tắc. Nó cũng cung cấp giám sát hiệu suất và cấu hình.
-
Hợp chất để bảo vệ chống lại sự xâm nhập của các hạt rắn và nước.
-
Vỏ để gắn cảm biến và bảo vệ khỏi các tác động cơ học khác nhau. Vỏ được làm bằng đồng thau hoặc polyamit và được hoàn thiện bằng chốt.
Cảm biến vị trí cảm ứng được sử dụng rộng rãi trong các hệ thống tự động hóa công nghiệp, nơi cần xác định định kỳ hoặc liên tục vị trí của bất kỳ bộ phận nào của cơ chế. Cảm biến tạo ra một tín hiệu được gửi đến biến tần. Bộ khởi động, bộ điều khiển, rơle, bộ biến tần, v.v. có thể hoạt động như một cơ chế điều hành. Điều chính là các thông số của cảm biến tương ứng với các thông số của biến tần về điện áp và dòng điện.
Hầu hết các cảm biến không phải là thiết bị cấp nguồn, chúng chủ yếu là thiết bị báo hiệu, do đó, theo quy luật, bản thân cảm biến không chuyển đổi bất cứ thứ gì mạnh mẽ mà chỉ điều khiển, đưa ra tín hiệu điều khiển, hoạt động như một thiết bị bắt đầu hành động có thể được kết nối để chuyển đổi năng lượng.
Cảm biến vị trí cảm ứng hiện đại thường được tìm thấy trong hai phiên bản vỏ nhựa hoặc kim loại: hình chữ nhật hoặc hình trụ. Đường kính của cảm biến có tiết diện tròn có thể từ 4 đến 30 mm, nhưng đường kính được sử dụng phổ biến nhất là 18 và 12 mm.
Khi cảm biến được gắn trên thiết bị, một khoảng cách được đặt giữa tấm kim loại và vùng truyền động của cảm biến, thông thường khoảng cách này không vượt quá đường kính của cảm biến và theo quy luật, nó nhỏ hơn 2-3 lần so với đường kính của nó.
Theo phương thức kết nối, cảm biến vị trí cảm ứng có thể là hai dây, ba dây, bốn dây và năm dây.
Hai dây trực tiếp chuyển đổi tải, chẳng hạn như cuộn dây khởi động, nghĩa là chúng hoạt động giống như một công tắc thông thường. Cảm biến hai dây yêu cầu khả năng chịu tải, vì vậy chúng không phải lúc nào cũng phù hợp như một công cụ đáng tin cậy, nhưng chúng không mất đi tính liên quan.
Tải chỉ được kết nối nối tiếp với cảm biến, nếu sử dụng điện áp không đổi thì điều quan trọng là phải quan sát cực tính, nếu cực tính xen kẽ không quan trọng, điều chính là công suất và dòng điện được chuyển đổi.
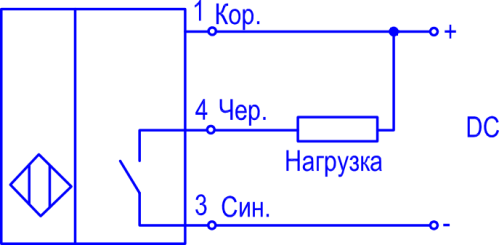
Cảm biến ba dây có dây thứ ba để cấp nguồn cho chính cảm biến và đây là giải pháp phổ biến nhất. Cảm biến bốn dây và năm dây có đầu ra bóng bán dẫn hoặc rơle để kết nối tải và dây thứ năm cho phép bạn chọn chế độ hoạt động của cảm biến, trạng thái đầu ra ban đầu.
Vì các đầu ra có thể là cả rơle và bóng bán dẫn, nên các cảm biến được chia thành ba loại theo thiết bị của các đầu ra: rơle, npn và pnp.
Cảm biến có đầu ra rơle
Một cảm biến có đầu ra rơle có cách ly điện của mạch cung cấp với mạch đi kèm. Nó chuyển mạch một dây và điện áp trong mạch chuyển mạch không đặc biệt quan trọng. Do mạch cấp nguồn của cảm biến được cách điện nên đây có thể coi là một ưu điểm của cảm biến rơle. Cảm biến loại này thường lớn.
Cảm biến với đầu ra bóng bán dẫn pnp
Cảm biến có một bóng bán dẫn pnp ở đầu ra chuyển đổi dây dương với tải. Một tải được kết nối với mạch thu của bóng bán dẫn pnp đầu ra, được kết nối vĩnh viễn với âm thông qua dây dẫn thứ hai của nó.
Cảm biến với đầu ra bóng bán dẫn npn
Cảm biến có một bóng bán dẫn NPN ở đầu ra chuyển đổi dây âm với tải. Một tải được kết nối với mạch thu của bóng bán dẫn npn đầu ra, được kết nối vĩnh viễn bằng dây dẫn thứ hai của nó với dây dẫn dương.
Theo trạng thái ban đầu của đầu ra, các cảm biến vị trí cảm ứng có thể là các tiếp điểm thường đóng hoặc thường mở. Trạng thái ban đầu có nghĩa là trạng thái này ở thời điểm cảm biến chưa được kích hoạt, nghĩa là nó chưa được kích hoạt.
Nếu các tiếp điểm đầu ra thường đóng, thì tải được kết nối khi không hoạt động, nếu nó thường mở, thì cho đến khi cảm biến được kích hoạt, tải sẽ bị cắt và không có nguồn điện nào được cung cấp cho biến tần (ví dụ: công tắc tơ). Các tiếp điểm thường đóng được chỉ định ở định dạng tiếng Anh — N.C. (Thường Đóng), Thường Mở — N.O. (Thường mở).
Do đó, các cảm biến có đầu ra bóng bán dẫn có bốn loại: hai loại theo độ dẫn điện (pnp hoặc npn) và hai loại theo trạng thái ban đầu của đầu ra. Cũng có thể có độ trễ khi bật hoặc tắt.

Tùy thuộc vào loại ổ đĩa được kết nối với cảm biến, cũng như phương pháp cấp nguồn, logic của cảm biến có thể dương hoặc âm. Điều này là do mức điện áp kích hoạt đầu vào của thiết bị.
Nếu đầu vào được kích hoạt khi dây âm của bộ truyền động được nối với đất, với âm, thì logic được gọi là âm, kết nối như vậy là đặc trưng của các cảm biến có đầu ra bóng bán dẫn loại npn.
Logic dương tương ứng với việc kết nối dây dương của biến tần với nguồn điện dương khi được kích hoạt, logic này là điển hình của các cảm biến có đầu ra bóng bán dẫn pnp. Thông thường, có một logic tích cực đối với hoạt động của các cảm biến quy nạp đối với vị trí của các cơ chế.
Các loại cảm biến vị trí cảm ứng cũ được sử dụng phổ biến nhất
Cảm biến vị trí cảm ứng IKV-22
Cảm biến cảm ứng IKV-22. Hoạt động của các cảm biến này dựa trên nguyên lý thay đổi điện trở cảm ứng của cuộn dây có lõi thép khi khe hở không khí trong mạch từ thay đổi.
Một mạch từ có hai cuộn dây được gắn trên một tấm thép, đậy bằng nắp nhựa. Hai tụ điện MBGP (một có công suất 15 μF, 200 V, tụ còn lại có công suất 10 μF, 400 V) được gắn vào tấm từ phía dưới. Các tụ điện được bao phủ bởi một vỏ bọc. Cáp được kết nối thông qua con dấu. Một shunt từ tính được lắp đặt trên cơ chế, kích thước của nó tối thiểu phải là: độ dày 2 mm, chiều rộng 80 mm, chiều dài 140 mm. Khe hở không khí giữa mạch từ và shunt là 6 ± 4 mm.
Rơle đầu ra thường được bật và tắt tại thời điểm khi shunt từ đi qua cảm biến, khi điện trở cảm ứng của cuộn dây thay đổi, cộng hưởng dòng điện xảy ra và dòng điện qua cuộn dây rơle giảm xuống. Các rơle này: loại MKU-48, 12 V AC, dòng điện không quá 0,45 A, dòng điện giảm không quá 0,1 A.Điện áp cung cấp cho mạch cảm biến là rơle 24 V AC.
Cảm biến vị trí cảm ứng ID-5
Trong các xưởng luyện kim, các cảm biến cảm ứng loại ID-5 được sử dụng, được thiết kế để hoạt động ở nhiệt độ môi trường lên tới + 80 ° C và độ ẩm lên tới 100%. Bụi dẫn điện và quy mô là chấp nhận được. Bộ khuếch đại đầu ra bán dẫn loại UID-10 được sử dụng với cảm biến. Công suất đầu ra của bộ khuếch đại (25 W) đủ để bật các rơ le REV-800, công tắc tơ KP21, MK-1, v.v.
Khoảng cách không khí giữa cảm biến và đối tượng sắt từ được quan sát có thể lên tới 30 mm. Kích thước của cảm biến ID-5 là 187x170x70 mm, điện áp cung cấp là 220 V ± 15%, 50 Hz.
Công tắc không tiếp xúc BSP kích thước nhỏ
Công tắc chuyển động nhỏ BSP-2 (có ngõ ra không tiếp điểm, tới phần tử logic) và BRP (có ngõ ra tới rơle PE-21, 24 V, 16 Ohm) được sử dụng trên máy cắt kim loại.
Công tắc BSP-2 bao gồm một cảm biến biến áp vi sai và một bộ kích hoạt bán dẫn. Hệ thống từ tính của cuộn dây cảm biến thứ nhất được di chuyển bằng một tấm thép và cuộn dây thứ hai được điều khiển khi nó di chuyển trên hệ thống từ tính được kết nối với cơ cấu phần ứng phẳng. Các cuộn dây được bật theo hướng ngược lại.
Nếu phần ứng ở phía trên cảm biến, điện kháng cảm ứng của các cuộn dây bằng nhau và đầu ra cảm biến của máy biến áp vi sai bằng không. Trong trường hợp này, điện áp ít nhất 2,5 V xuất hiện ở đầu ra của bộ kích hoạt, đủ để phần tử logic hoạt động.
Trong trường hợp không có phần ứng phía trên cảm biến, một điện áp được đặt vào bộ kích hoạt, điện áp này sẽ đưa nó trở lại trạng thái ban đầu. Sau đó, tín hiệu đầu ra của công tắc bằng không.
Nguyên tắc hoạt động của công tắc BRP về nhiều mặt tương tự như của BSP-2... Một cảm biến cảm ứng (theo mạch của biến áp vi sai), một bộ kích hoạt và một bộ khuếch đại được lắp đặt bên trong hộp. Các cuộn thứ cấp có số vòng khác nhau được bật theo hướng ngược lại. Khi phần ứng chồng lên hệ thống từ tính của cảm biến, tín hiệu sẽ giảm và sau khi thay đổi pha, bộ kích hoạt được bật và rơle đầu ra bên ngoài (PE-21, 24 V, 16 Ohm) được kích hoạt.
Neo cố định vào cơ chế có kích thước 80x15x3 mm. Khoảng cách giữa neo và cảm biến là 4 mm. Độ chính xác của các công tắc ở chế độ danh nghĩa là ± 0,5 mm, chênh lệch truyền động không quá 5 mm. Tại. dao động về điện áp và nhiệt độ cung cấp, sai số của công tắc BSP-2 và BRP có thể đạt tới ± (2,5-f-3,0) mm.
Cảm biến cảm ứng tần số cao VKB
Các cảm biến cảm ứng loại VKB có độ chính xác cao với phần ứng hình chữ U hoặc phẳng cũng được sử dụng để tự động hóa máy cắt kim loại. Các cực của máy biến áp tích hợp tạo thành một hệ thống điện từ mở. Khe hở không khí làm việc là 0,1-0,15 mm.
Điện áp đầu ra từ cuộn thứ cấp của máy biến áp được đưa đến mạch đo vi sai và sau đó đến bộ khuếch đại bóng bán dẫn. Tổng sai số của cảm biến với dao động nhiệt độ từ 5 đến 40 ° C và điện áp từ 85 đến 110% giá trị danh định là ± (0,064-0,15) mm, chênh lệch đáp ứng không vượt quá 0,4 mm. Tốc độ di chuyển tối đa của cơ chế là 10 m / mm. Kích thước cảm biến 62x34x24 mm. Điện áp cung cấp 12 V.
Các loại cảm biến cảm ứng chính xác chuyên dùng cho máy cắt kim loại có mạch vi sai có sai số nhỏ hơn ± 0,01 mm.Các cảm biến như vậy bao gồm một công tắc chuyển động không tiếp xúc loại VPB12, bao gồm một bộ phận cảm biến trên một thiết bị điện tử. Bộ phận cảm biến bao gồm cảm biến công việc cảm ứng, cảm biến bù cảm ứng và bảng mạch in. Cơ chế được gắn kết: điều khiển phần tử ferit. Điện áp cung cấp 12 V DC. Khoảng cách phơi sáng tối đa không quá 0,12 mm. Rơle loại RPU-0 có thể được kết nối với đầu ra của cảm biến. Dòng tải tối đa của thiết bị đầu ra là 0,16 A.
Cảm biến vị trí máy phát điện
Cảm biến loại này nhỏ gọn và rất chính xác. Các máy phát cảm biến thuộc dòng KVD-6M và KVD-25 (có khe cắm), KVP-8 và KVP-16 (máy bay) đã chứng tỏ bản thân rất tốt. Chúng phù hợp để sử dụng ở nơi có độ ẩm và bụi cao. Các phần tử của mạch bán dẫn của cảm biến (máy phát điện và bộ kích hoạt) được đặt trong vỏ làm bằng polystyrene chống sốc. Niêm phong được thực hiện với một hợp chất làm cứng lạnh. Phạm vi nhiệt độ hoạt động là từ — 30 đến +50 ° C.
Cảm biến HPC tạo ra tín hiệu rời rạc khi một tấm kim loại («cờ») đi qua khe, gây ra sự cố trong quá trình tạo và chuyển đổi bộ kích hoạt. Chiều rộng của khe là 6 mm đối với cảm biến KVD-6M và 25 mm đối với cảm biến KVD-25.
Các cảm biến KVP-8 và KVP-16 được kích hoạt khi một tấm kim loại đi ngang qua chúng ở khoảng cách tối đa lần lượt là 8 và 16 mm.