Lý thuyết otomat, otomat hữu hạn
Cấu trúc, thiết kế, nguyên lý hoạt động của các loại máy khác nhau phần lớn được xác định bởi mục đích chức năng của nó. Phân biệt giữa máy móc công nghệ, vận tải, máy tính, quân sự và các máy móc khác. Toàn bộ các tổ hợp tự động được thiết kế để thực hiện các quy trình công nghệ phức tạp được giới thiệu rộng rãi trong các ngành công nghiệp khác nhau. Máy tự động được thiết kế và xây dựng để thực hiện các chức năng logic khác nhau (máy logic).

Lý thuyết ô tô — phần điều khiển học, phát sinh dưới ảnh hưởng của các yêu cầu về công nghệ của máy tính kỹ thuật số và máy điều khiển. Máy tự động rời rạc được nghiên cứu trong lý thuyết máy tự động là các mô hình trừu tượng của các hệ thống thực (cả kỹ thuật và sinh học) xử lý thông tin (kỹ thuật số) rời rạc ở các bước thời gian rời rạc.
Lý thuyết máy tự động dựa trên các khái niệm toán học chính xác hình thức hóa các ý tưởng trực quan về hoạt động (hành vi) của máy tự động và về cấu trúc của nó (cấu trúc bên trong).
Trong trường hợp này, chuyển đổi thông tin luôn được hiểu là một thao tác biến đổi các chuỗi đầu vào bao gồm các chữ cái từ bảng chữ cái đầu vào thành các chuỗi đầu ra bao gồm các chữ cái từ bảng chữ cái đầu ra.
Bộ máy logic toán học, đại số, lý thuyết xác suất, tổ hợp và lý thuyết đồ thị được sử dụng rộng rãi.
Vấn đề với lý thuyết máy tự động trong một số bộ phận của nó (lý thuyết cấu trúc của máy tự động) ngày càng tăng từ lý thuyết về mạch tiếp điểm-rơle, bắt đầu hình thành vào cuối những năm 1930. bao gồm phương pháp đại số logic.

Trong lý thuyết cấu trúc của máy tự động, các loại sơ đồ khác nhau được nghiên cứu, được thiết kế để mô tả cách một máy tự động phức tạp được tạo ra từ các thành phần (phần tử) đơn giản hơn được kết nối đúng cách trong một hệ thống.
Một hướng khác, được gọi là lý thuyết trừu tượng về máy tự động, nghiên cứu hành vi của máy tự động (nghĩa là bản chất của quá trình chuyển đổi thông tin do chúng thực hiện), đồng thời trừu tượng hóa từ các chi tiết cụ thể của cấu trúc bên trong của chúng, và phát sinh vào những năm 1950.
Trong khuôn khổ lý thuyết trừu tượng về máy tự động, nội dung của các khái niệm "máy tự động" và "máy" về cơ bản đã cạn kiệt bởi mô tả tiêu chuẩn về quá trình chuyển đổi thông tin do máy tự động thực hiện. Một phép biến đổi như vậy có thể mang tính xác định, nhưng nó cũng có thể mang tính xác suất về bản chất.
Được nghiên cứu nhiều nhất là các máy xác định (máy tự động), bao gồm máy tự động hữu hạn - đối tượng nghiên cứu chính trong lý thuyết về máy tự động.
Một máy trạng thái hữu hạn được đặc trưng bởi một lượng bộ nhớ hạn chế (số trạng thái bên trong) và được xác định bằng hàm chuyển đổi.Với một số lý tưởng hóa hợp lý, tất cả các máy toán học hiện đại và thậm chí cả bộ não, từ quan điểm hoạt động của chúng, có thể được coi là máy tự động hữu hạn.
Các thuật ngữ "máy tuần tự", "máy tự động Milly", "máy tự động Moore" được sử dụng trong tài liệu (và không đồng nhất bởi tất cả các tác giả) như các từ đồng nghĩa với thuật ngữ "máy tự động hữu hạn" hoặc để nhấn mạnh các tính năng nhất định trong chức năng chuyển đổi của một máy hữu hạn. người máy.
Máy tự động với bộ nhớ không giới hạn là một máy Turing có khả năng thực hiện (có khả năng) bất kỳ chuyển đổi thông tin hiệu quả nào. Khái niệm “máy Turing” ra đời sớm hơn khái niệm “máy trạng thái hữu hạn” và chủ yếu được nghiên cứu trong lý thuyết thuật toán.
Lý thuyết ô tô trừu tượng có liên quan chặt chẽ với các lý thuyết đại số nổi tiếng, chẳng hạn như lý thuyết nửa nhóm. Từ quan điểm ứng dụng, các kết quả đặc trưng cho việc chuyển đổi thông tin trong máy tự động về kích thước bộ nhớ rất đáng quan tâm.
Đây là trường hợp, ví dụ, trong các vấn đề về thí nghiệm trên máy tự động (tác phẩm của E.F. Moore, v.v.), trong đó thông tin này hoặc thông tin khác về các chức năng chuyển tiếp của máy tự động hoặc về dung lượng bộ nhớ của nó được lấy từ kết quả của thí nghiệm.
Một nhiệm vụ khác là tính toán chu kỳ của chuỗi đầu ra, dựa trên thông tin có sẵn về kích thước bộ nhớ của máy tự động và chu kỳ của chuỗi đầu vào.
Tầm quan trọng lớn là sự phát triển của các phương pháp giảm thiểu bộ nhớ của các máy trạng thái hữu hạn và nghiên cứu hành vi của chúng trong môi trường ngẫu nhiên.
Trong lý thuyết máy tự động trừu tượng, vấn đề tổng hợp như sau.Theo một số ngôn ngữ được hình thức hóa rõ ràng, các điều kiện được viết cho hành vi của máy tự động được thiết kế (đối với sự kiện được trình bày trong máy tự động). Trong trường hợp này, cần phát triển các phương pháp theo từng điều kiện đã viết:
1) tìm hiểu xem liệu có tồn tại một máy trạng thái mà thông tin được chuyển đổi bởi nó đáp ứng điều kiện này hay không;
2) nếu có, thì các chức năng chuyển đổi của một máy trạng thái hữu hạn như vậy được xây dựng hoặc kích thước bộ nhớ của nó được ước tính.
Giải pháp cho nhiệm vụ tổng hợp trong một công thức như vậy giả định trước việc tạo ra một ngôn ngữ thuận tiện để ghi lại các điều kiện hoạt động của máy tự động với các thuật toán thuận tiện để chuyển từ chức năng ghi sang chức năng chuyển tiếp.
Trong lý thuyết cấu trúc của ô tô tự động, vấn đề tổng hợp bao gồm việc xây dựng một chuỗi các phần tử thuộc một loại nhất định để nhận ra một ô tô hữu hạn được cung cấp bởi các hàm chuyển tiếp của nó. Trong trường hợp này, họ thường nêu một số tiêu chí tối ưu (ví dụ: số lượng phần tử tối thiểu) và tìm cách đạt được một sơ đồ tối ưu.
Hóa ra sau đó, điều này có nghĩa là một số phương pháp và khái niệm được phát triển trước đó liên quan đến các mạch tiếp điểm rơle có thể áp dụng cho các loại mạch khác.
Liên quan đến sự phát triển của công nghệ điện tử, phổ biến nhất là các kế hoạch của các yếu tố chức năng (mạng logic). Một trường hợp đặc biệt của mạng logic là mạng nơ-ron trừu tượng, các phần tử của nó được gọi là nơ-ron.
Nhiều phương pháp tổng hợp đã được phát triển, tùy thuộc vào loại mạch và việc chuyển đổi thông tin mà chúng dự định (Tổng hợp các thiết bị chuyển tiếp).
Nhìn -Tối thiểu hóa mạch tổ hợp, sơ đồ Carnot, tổng hợp mạch
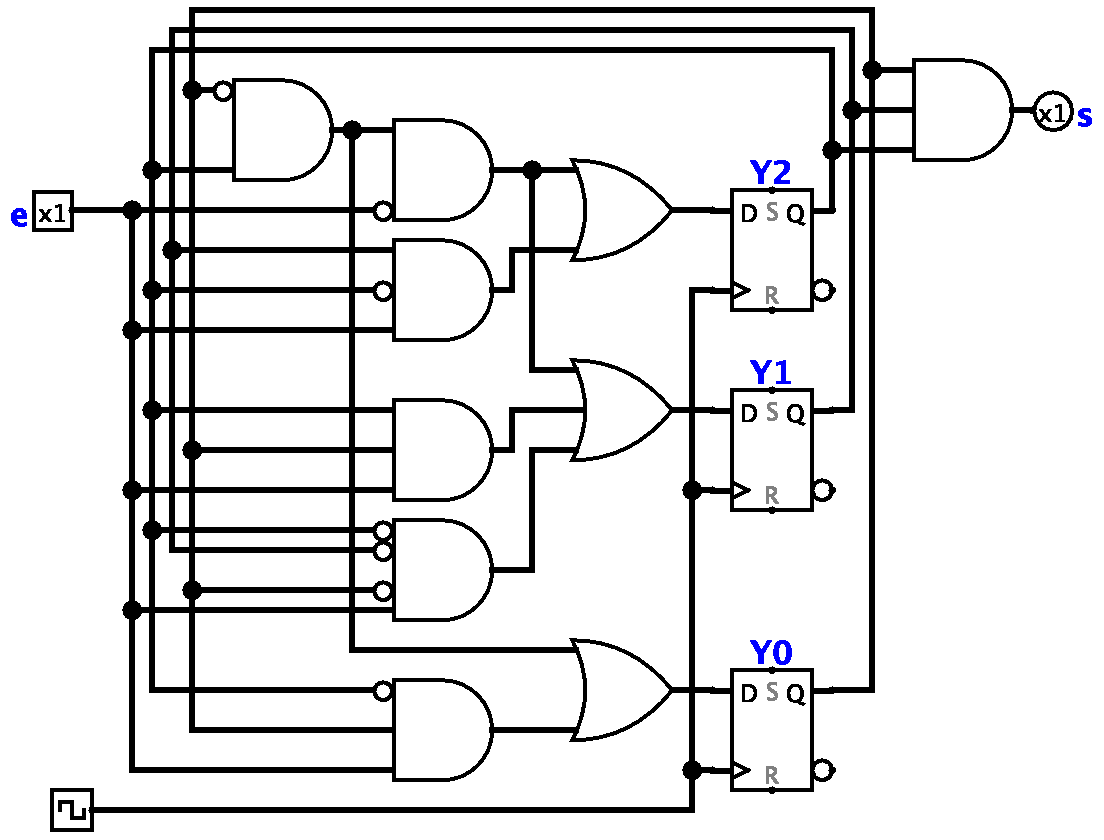
Máy trạng thái hữu hạn - mô hình toán học của hệ thống điều khiển với kích thước bộ nhớ cố định (không có khả năng tăng trong quá trình vận hành).
Khái niệm về máy trạng thái hữu hạn là một khái niệm trừu tượng toán học đặc trưng cho các đặc tính chung của một tập hợp các hệ thống điều khiển (ví dụ: thiết bị chuyển tiếp nhiều vòng). Tất cả các hệ thống như vậy đều có các đặc điểm chung được chấp nhận một cách tự nhiên như là định nghĩa của máy tự động hữu hạn.
Mỗi máy tự động đã hoàn thành đều có lối vào tiếp xúc với các tác động bên ngoài và các yếu tố bên trong. Đối với cả phần tử đầu vào và phần tử bên trong, có một số trạng thái riêng biệt cố định mà chúng có thể thực hiện.
Sự thay đổi trạng thái của các yếu tố đầu vào và bên trong xảy ra tại các thời điểm riêng biệt, khoảng thời gian giữa chúng được gọi là tích tắc. Trạng thái bên trong (trạng thái của các bộ phận bên trong) ở cuối băng được xác định hoàn toàn bởi trạng thái bên trong và trạng thái của đầu vào ở đầu băng.
Tất cả các định nghĩa khác về máy tự động hữu hạn có thể được rút gọn thành đặc tính này, đặc biệt là các định nghĩa giả định rằng máy tự động hữu hạn có đầu ra phụ thuộc vào trạng thái bên trong của máy tự động tại một thời điểm nhất định.
Xét về đặc điểm như vậy, bản chất của đầu vào và trạng thái bên trong của nó không liên quan đến mô tả của một máy tự động hoàn chỉnh. Thay vì đầu vào và trạng thái, bạn chỉ có thể xem số của chúng theo cách đánh số ngẫu nhiên.
Máy trạng thái sẽ được đặt nếu sự phụ thuộc của số trạng thái bên trong của nó vào số trạng thái bên trong trước đó và số trạng thái đầu vào trước đó được chỉ định. Một nhiệm vụ như vậy có thể ở dạng một bảng cuối cùng.
Một cách phổ biến khác để xác định một máy tự động hoàn chỉnh là xây dựng cái gọi là các sơ đồ chuyển tiếp. Trạng thái đầu vào thường được gọi đơn giản là đầu vào và trạng thái bên trong chỉ đơn giản là trạng thái.
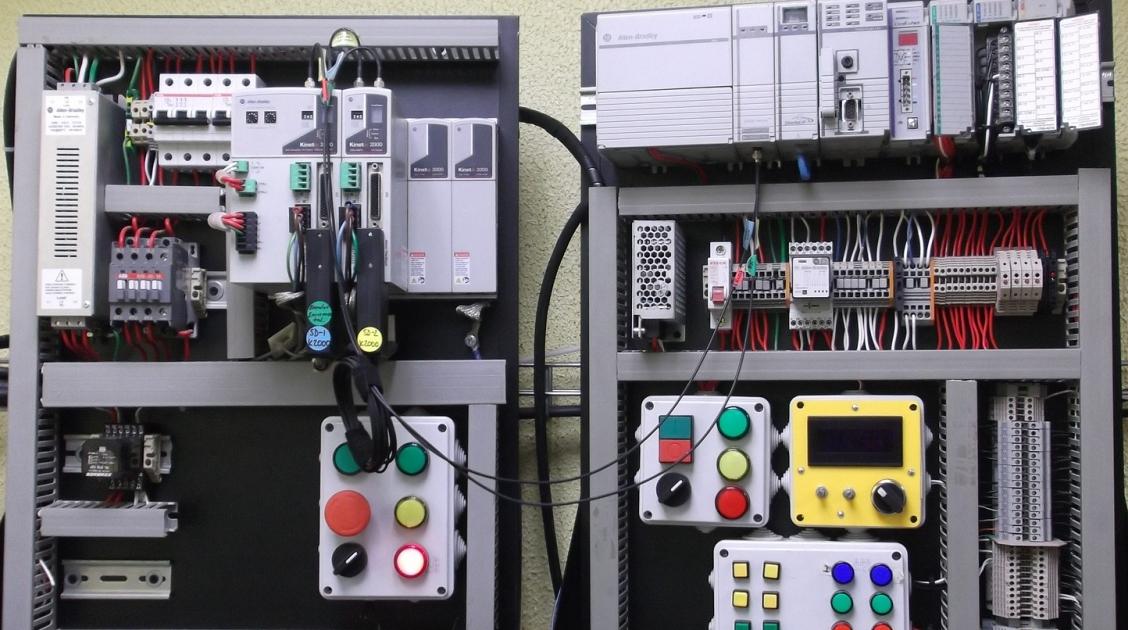
Máy trạng thái hữu hạn có thể là mô hình của cả thiết bị kỹ thuật và một số hệ thống sinh học. Máy tự động thuộc loại đầu tiên, ví dụ, là thiết bị chuyển tiếp và các máy tính điện tử khác nhau, bao gồm cả. bộ điều khiển logic khả trình.
Trong trường hợp thiết bị rơle, vai trò của các trạng thái đầu vào được thực hiện bởi sự kết hợp các trạng thái của các phần tử nhạy cảm của thiết bị rơle (mỗi sự kết hợp của các trạng thái đó là một «trạng thái phức tạp», được đặc trưng bởi dấu hiệu của tất cả các phần tử nhạy cảm của những trạng thái rời rạc mà chúng có trong một thời điểm nhất định). Tương tự như vậy, sự kết hợp trạng thái của các phần tử trung gian của thiết bị chuyển tiếp đóng vai trò là trạng thái bên trong.
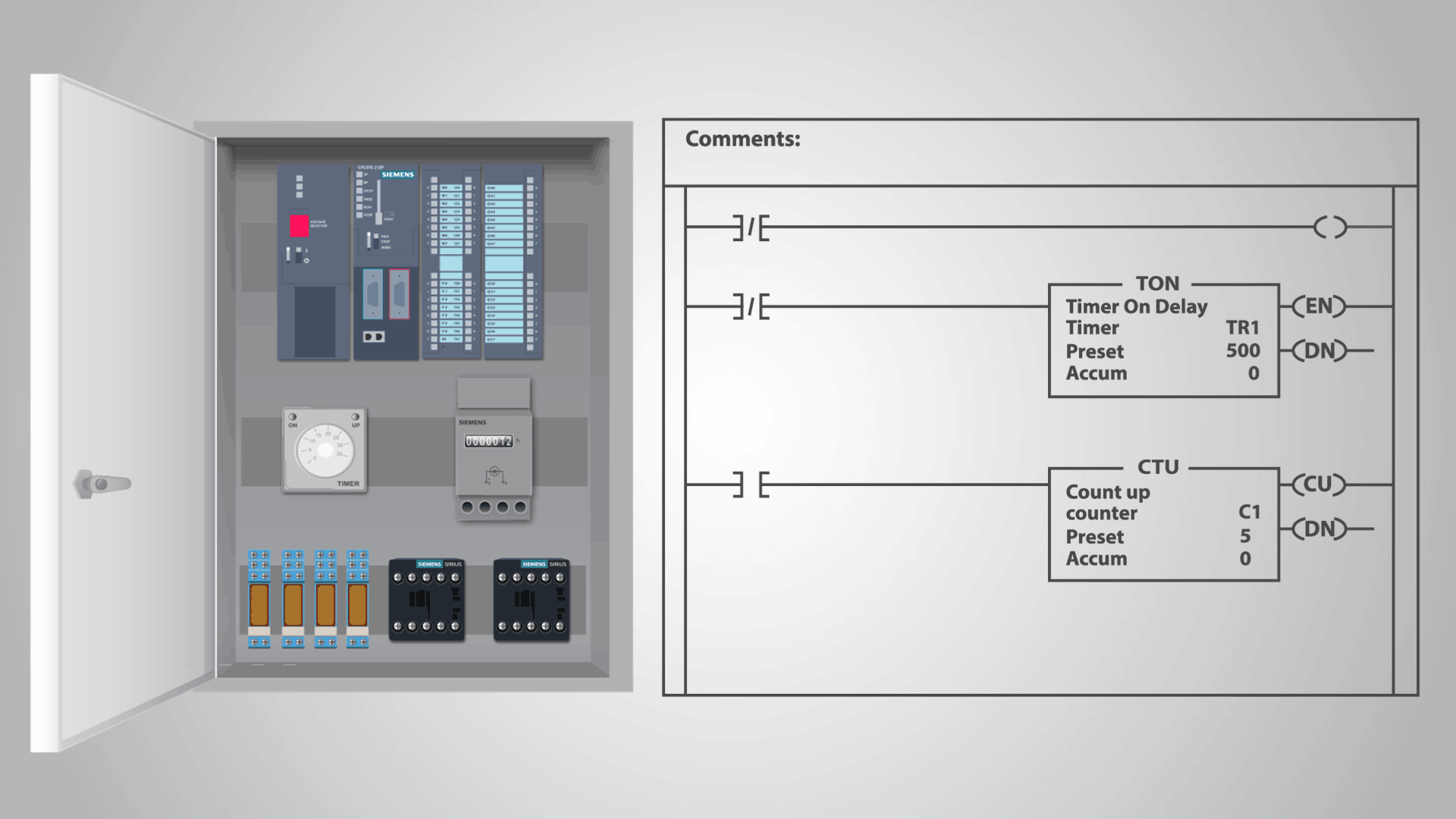
Bộ điều khiển logic khả trình (PLC) là một ví dụ về thiết bị hành động chuyển tiếp có thể được gọi là máy trạng thái độc lập.
Trên thực tế, một khi chương trình đã được nhập vào PLC và bộ điều khiển đã bắt đầu tính toán, nó không bị ảnh hưởng bởi các tác động bên ngoài và mỗi trạng thái tiếp theo được xác định hoàn toàn bởi trạng thái trước đó. Chúng ta có thể giả sử rằng đầu vào có cùng trạng thái trong mọi chu kỳ xung nhịp.
Ngược lại, bất kỳ máy trạng thái hữu hạn nào có trạng thái đầu vào khả dĩ duy nhất được gọi là tự trị, vì trong trường hợp này, môi trường bên ngoài không mang thông tin kiểm soát hành vi của nó.
Xem thêm:
Việc sử dụng các hệ thống vi xử lý trong kỹ thuật điện trên ví dụ về việc sử dụng PLC