So sánh công tắc hành trình tiếp xúc và không tiếp xúc
Trong tự động hóa công nghiệp, mạch được sử dụng rộng rãi công tắc hành trình (vị trí) và công tắc nhiều thiết kế được thiết kế để kiểm soát vị trí của các cơ chế sản xuất khác nhau và dựa trên sự chuyển đổi chuyển động của các cơ chế này trong tín hiệu điện.
Công tắc vị trí cũng có thể được sử dụng để thực hiện các chức năng khác ngoài điều khiển vị trí của cơ chế sản xuất, ví dụ, điều khiển góc quay, mức độ, áp suất trọng lượng, v.v.

Công tắc hướng là thiết bị có hành động rời rạc, hoạt động theo nguyên tắc tăng dần, nghĩa là chúng chỉ phản ứng với sự thay đổi vị trí của cơ chế được điều khiển. Tín hiệu đầu ra của các công tắc định hướng là một hàm mơ hồ của chuyển động của cơ chế từ một vị trí ban đầu nhất định.
Các loại tắc đường
Tùy thuộc vào các nguyên tắc chuyển đổi vị trí, phương pháp chuyển đổi được chia thành:
-
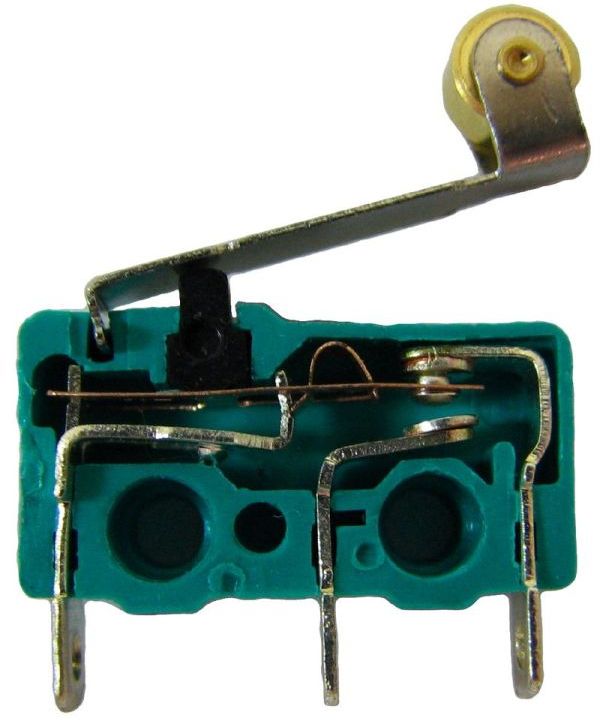
tiếp xúc cơ học được thực hiện với các tiếp điểm chuyển mạch và các phần tử nhạy cảm với tiếp điểm;
-
tiếp điểm tĩnh (cơ điện từ), phần tử nhạy cảm không tiếp xúc và phần tử chuyển mạch là tiếp điểm;
-
tĩnh không tiếp xúc, nhạy cảm và chuyển đổi các yếu tố từ đó không tiếp xúc được thực hiện.
Trong bản chất tiếp xúc của nút "chuyển đổi - dừng", nghĩa là, trong bản chất tiếp xúc của kết nối của phần tử truyền động (tín hiệu điều khiển đầu vào) với phần tử nhạy cảm, nút này được gọi là cơ học và không tiếp xúc - tĩnh .
Tùy thuộc vào thiết kế, các công tắc có thể được kết hợp hoặc tách rời. Trong trường hợp đầu tiên, các phần tử nhạy cảm và chuyển mạch được đặt trong một vỏ và được thực hiện theo cấu trúc tổng thể. Trong trường hợp thứ hai, phần tử nhạy cảm có thể được đặt ở khoảng cách vài chục đến hàng trăm mét so với công tắc.
Sự biến dạng của từ trường của công tắc đường dẫn đạt được bằng cách thay đổi các tham số mạch từ yếu tố nhạy cảm Các tham số biến có thể là diện tích bề mặt hoạt động và kích thước của khe hở không khí. Tính thấm từ mạch từ.
Hiện nay, lĩnh vực ứng dụng của công tắc vị trí tiếp điểm cơ khí trong tự động hóa công nghiệp ngày càng thu hẹp, và câu hỏi đặt ra là sự vô dụng của loại công tắc vị trí này cho mục đích xây dựng hệ thống điều khiển tự động.
Cái sau được gây ra bởi những điều sau đây:
-
Sự phức tạp trong thiết kế của cụm công tắc dừng, do tính nghiêm ngặt của các yêu cầu liên quan đến giới hạn dao động cho phép của một số tham số, gây khó khăn đáng kể trong quá trình sản xuất và điều chỉnh.
-
Mức độ quan trọng tương đối cao của các đặc tính chính xác của thiết bị này đối với ảnh hưởng của các yếu tố gây mất ổn định (độ mòn của bề mặt tiếp xúc, độ lỏng của ốc vít, sự sai lệch của các bộ phận chuyển động, v.v.).
Một số giải pháp thiết kế cơ chế hoàn toàn không thể thực hiện được dựa trên các công tắc tiếp điểm cơ học. Chúng bao gồm các cơ chế yêu cầu mức tốc độ và tần suất chuyển động cao cho phép.
Nếu tốc độ hoạt động cần thiết của công tắc đường có thể giảm do các liên kết động học bổ sung của cơ chế, trong số những thứ khác, làm giảm các đặc tính chất lượng của hệ thống điều khiển (đặc biệt là các thông số độ chính xác), thì tần số hoạt động cho phép ( độ phân giải) không thể được tăng lên bởi các biến chứng cấu trúc.
Xem thêm: Lắp đặt công tắc hành trình và công tắc
Trong trường hợp này, lý do cho việc sử dụng rộng rãi nguyên tắc tiếp xúc cơ học của chuyển đổi vị trí là gì? Câu trả lời cho câu hỏi này nên được tìm kiếm ở hai khía cạnh: trong các nguyên tắc xây dựng hệ thống điều khiển tự động hiện có và trong các ưu điểm của mạch chuyển đổi đường tiếp xúc.
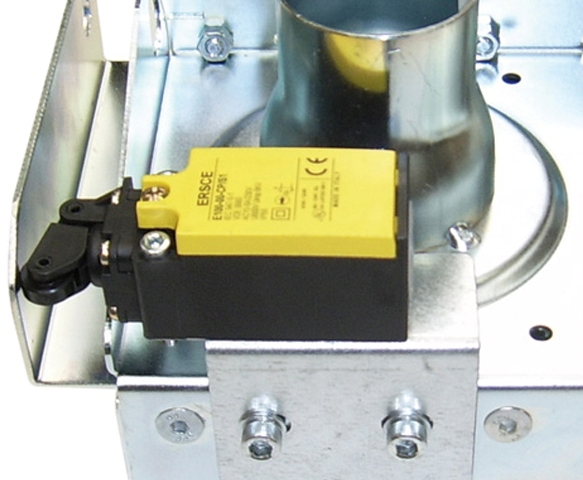
Ưu điểm của công tắc đường dẫn tiếp xúc
Công tắc tiếp điểm cơ học, thường được thực hiện với đầu ra nhiều mạch, được đặc trưng bởi các ưu điểm sau:
-
tỷ lệ chuyển mạch cao;
-
công suất điều khiển cụ thể cao (tỷ lệ giữa công suất bao gồm trên kích thước tổng thể);
-
tính phổ quát, nghĩa là khả năng chuyển đổi cả mạch điện một chiều và xoay chiều;
-
phạm vi lớn của điện áp bao gồm;
-
tiêu thụ năng lượng bên trong không đáng kể (giá trị nhỏ của điện trở thoáng qua của các tiếp điểm ở trạng thái đóng);
-
sự phụ thuộc thấp của độ chính xác và tính ổn định của hoạt động vào những thay đổi trong công suất được kiểm soát.
Nhược điểm của công tắc đường tiếp xúc
Nguyên tắc tiếp xúc cơ học của các thiết bị này thường không cho phép đáp ứng các yêu cầu ngày càng tăng về độ tin cậy, độ bền và độ chính xác của hệ thống tự động hóa. Ngoài ra, công tắc tiếp điểm cơ học rất nhạy cảm với tác động của các yếu tố khí hậu khác nhau (đặc biệt là ở nhiệt độ thấp).
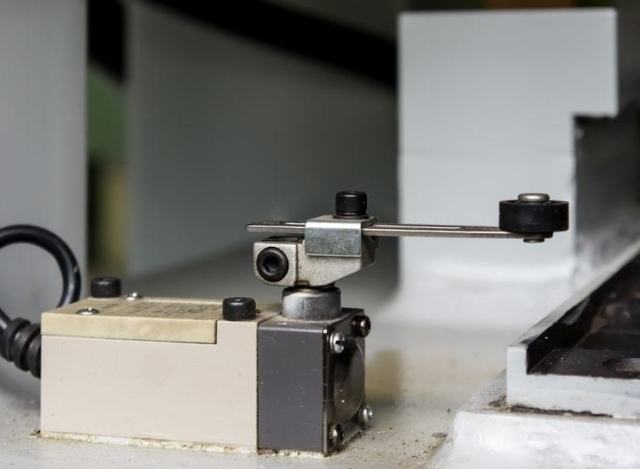
Công tắc tiếp điểm cơ học được đặc trưng bởi các mức giới hạn cho phép của tốc độ chuyển động tối đa và tối thiểu của điểm dừng chuyển mạch, nằm trong khoảng 0,3 — 30 m / phút, và việc tăng tốc độ của điểm dừng chuyển mạch trên mức cho phép dẫn đến giảm mạnh trong độ bền cơ học trên công tắc.
Trong các công tắc như vậy, độ lệch cho phép của hướng tác động của lực chuyển mạch so với trục của cần gạt là rất nhỏ và vượt quá chúng sẽ dẫn đến hư hỏng cơ học, đặc biệt là ở các công tắc có thanh kéo phía trước.
Để có được các đặc tính đầu ra của rơle (đặc tính điều khiển), các thiết bị lò xo kích hoạt được cung cấp trong thiết kế của các công tắc như vậy. Mức độ cần thiết của các đặc tính đầu ra rơle đạt được với chi phí giảm đáng kể độ bền của công tắc do các ứng suất động lớn xảy ra trong bộ kích hoạt tại thời điểm khởi động.
Trong các công tắc tiếp xúc tạm thời cơ học, độ rộng của vòng trễ (chênh lệch hành trình) của đặc tính đầu ra đạt đến một giá trị đáng kể, điều này hoàn toàn không thể chấp nhận được đối với một số quy trình công nghệ do thời gian của chu trình xử lý tăng không hiệu quả.
Việc giảm sự khác biệt trong hành trình của những trật bánh này có liên quan đến việc tăng độ phức tạp của thiết kế hoặc tăng kích thước của chúng. Ngoài ra, trong một số trường hợp, cần có lực cơ học đáng kể để kích hoạt công tắc tiếp điểm cơ học.
Ưu điểm và nhược điểm của công tắc tiệm cận
Các trường hợp được liệt kê ở trên dẫn đến nhu cầu phát triển các thiết bị không có nhược điểm đã đề cập, đồng thời có khả năng thực hiện các chức năng tương tự. Các thiết bị như vậy là công tắc tiệm cận, những lợi ích của nó bao gồm:
-
độ bền đáng kể với độ tin cậy cao và tần suất hoạt động cho phép cao;
-
không cần nỗ lực cơ học khi kích hoạt, độ nhạy thấp với rung động, gia tốc, v.v.;
-
độ nhạy không đáng kể của các tham số đối với những thay đổi trong phạm vi điều kiện bên ngoài tương đối rộng;
-
cải thiện các điều kiện của các dịch vụ hoạt động.
Do mức phản hồi thấp của công tắc tiệm cận, việc xây dựng công tắc dừng đã đơn giản hóa đáng kể trong khi vẫn duy trì độ ổn định cao theo thời gian của các đặc tính chính xác. Ngoài ra, việc không có các tiếp điểm điện và cơ khí đảm bảo an toàn cháy nổ cho các thiết bị này, giúp mở rộng đáng kể phạm vi ứng dụng có thể của chúng.
Một trong những nhược điểm đáng kể của công tắc giới hạn không tiếp xúc là sự phức tạp của việc thực hiện nhiều sửa đổi thiết kế dễ dàng thực hiện trong công tắc giới hạn tiếp xúc cơ học.
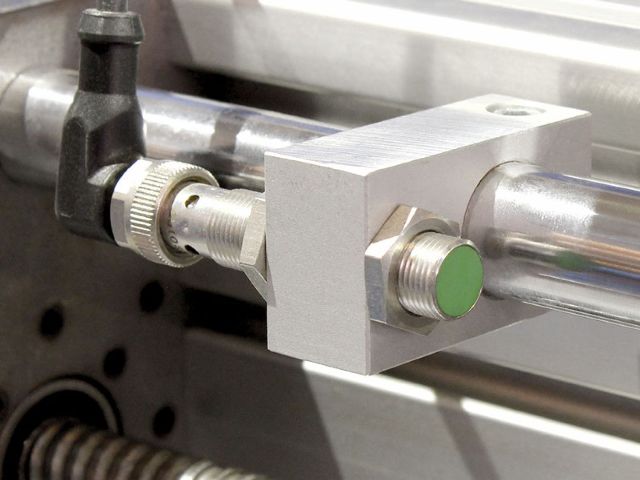
Thiết bị chuyển mạch tiệm cận
Nguyên lý hoạt động của công tắc đường dẫn tĩnh không tiếp xúc thuộc loại tham số dựa trên việc sử dụng biến dạng của từ trường hoặc điện trường do phần tử nhạy cảm tạo ra khi phần tử truyền động xuất hiện trong khu vực của nó, do đó trạng thái không cân bằng xảy ra trong mạch điện của công tắc và thiết bị đầu ra được kích hoạt.
Công tắc lân cận tĩnh thường được chế tạo với một mạch đầu ra duy nhất và trong một số công tắc, việc truyền động đi kèm với sự xuất hiện của tín hiệu ở đầu ra (hiệu ứng chuyển mạch trực tiếp), ở những công tắc khác - bằng sự biến mất (hiệu ứng chuyển mạch ngược), tương đương tương ứng với các tiếp điểm đóng và mở của các đường tiếp xúc cơ học.
Nếu có một phần tử khuếch đại trong mạch công tắc lân cận chế độ rơle, tham số đầu ra của phần tử cảm biến có thể phụ thuộc chức năng liên tục của chuyển động được điều khiển.
Hiện tại, nhiều sửa đổi thiết kế của công tắc hành trình không tiếp xúc được sử dụng, khác nhau về mức độ nhạy cảm (kích thước của khe hở làm việc), vị trí của khe hoặc mặt phẳng của phần tử nhạy cảm so với mặt phẳng lắp, hướng của dây dẫn, số bước của phần tử cảm biến (đối với thiết kế có khe), độ sâu của khe, chiều dài của dây kết nối, mức điện áp cung cấp, bản chất của bảo vệ chống lại ảnh hưởng của môi trường, v.v.
Khả năng sử dụng công tắc chuyển động không tiếp xúc được xác định bởi các thông số về đặc tính điện và cơ của chúng.
Các thông số điện bao gồm:
- bản chất của tín hiệu đầu ra và số lượng mạch đầu ra;
- tiêu thụ và điện năng đầu ra;
- hình dạng của tín hiệu đầu ra; hệ số chuyển mạch điện trở và điện áp (đối với chuyển mạch kiểu biến áp);
- đặc điểm thời gian (thời gian kích hoạt và giải phóng) và tần suất kích hoạt (độ phân giải);
- các mức và hình dạng của điện áp cung cấp, cũng như các giới hạn cho phép về độ lệch của chúng.
Các thông số hiệu suất cơ học bao gồm:
- độ nhạy (kích thước của khoảng cách làm việc),
- kích thước và kích thước kết nối;
- đặc điểm chính xác (lỗi lớn và bổ sung) và vi sai hành trình;
- đặc điểm lắp đặt (các loại phanh chuyển mạch và cách chúng được cài đặt, mức độ phản hồi, cách gắn và cài đặt công tắc);
- mức chống ồn.
Để biết thêm thông tin về Thiết bị chuyển mạch tiệm cận và Công tắc xem tại đây: Cảm biến không tiếp xúc cho vị trí của các cơ chế
Ivenski Yu.N.Công tắc hành trình không tiếp xúc trong tự động hóa công nghiệp