cảm biến điện thế
Cảm biến chiết áp là một điện trở thay đổi được đặt vào một điện áp cung cấp, giá trị đầu vào của nó là độ dịch chuyển tuyến tính hoặc góc của tiếp điểm thu dòng điện và giá trị đầu ra là điện áp do tiếp điểm này lấy, giá trị này thay đổi độ lớn theo vị trí của nó thay đổi.
Cảm biến điện thế được thiết kế để chuyển đổi các chuyển vị tuyến tính hoặc góc thành tín hiệu điện, cũng như để tái tạo các phụ thuộc chức năng đơn giản nhất trong các thiết bị tự động và tự động thuộc loại liên tục.
 Sơ đồ kết nối cảm biến điện thế
Sơ đồ kết nối cảm biến điện thế
Theo điện trở, cảm biến chiết áp được chia thành
-
lamellas với sức đề kháng liên tục;
-
cuộn dây có dây quấn liên tục;
-
với một lớp điện trở.

Cảm biến chiết áp lamellar được sử dụng để tiến hành các phép đo tương đối thô do một số lỗi thiết kế nhất định.
Trong các cảm biến như vậy, các điện trở không đổi, được chọn trên danh nghĩa theo một cách đặc biệt, được hàn vào các tấm mỏng.
Lamella là một cấu trúc với các phần tử dẫn điện và không dẫn điện xen kẽ trên đó tiếp xúc của bộ thu trượt.Khi bộ thu dòng được di chuyển từ phần tử dẫn điện này sang phần tử dẫn điện khác, tổng điện trở của các điện trở nối với nó thay đổi một lượng tương ứng với giá trị danh nghĩa của một điện trở. Sự thay đổi điện trở có thể xảy ra trên một phạm vi rộng. Lỗi đo lường được xác định bởi kích thước của các miếng đệm tiếp xúc.
Cảm biến chiết áp lamellar
Cảm biến chiết áp dây được thiết kế để đo chính xác hơn. Theo quy định, thiết kế của họ là một khung làm bằng getinax, textolite hoặc gốm sứ, trên đó một sợi dây mỏng được quấn thành một lớp, quay lần lượt, trên bề mặt được làm sạch mà bộ thu dòng điện trượt.
Đường kính của dây xác định lớp chính xác cảm biến chiết áp (cao là 0,03-0,1mm, thấp là 0,1-0,4mm). Vật liệu dây: manganin, fechral, hợp kim dựa trên kim loại quý. Vòng trượt được làm bằng vật liệu mềm hơn để dây không bị cọ xát.
Ưu điểm của cảm biến chiết áp:
-
đơn giản của thiết kế;
-
kích thước và trọng lượng nhỏ;
-
mức độ tuyến tính cao của các đặc tính tĩnh;
-
tính ổn định của các đặc tính;
-
khả năng hoạt động trên dòng điện xoay chiều và dòng điện một chiều.
Nhược điểm của cảm biến chiết áp:
-
sự hiện diện của một tiếp điểm trượt, có thể gây hư hỏng do vết tiếp xúc bị oxy hóa, cọ xát các vòng quay hoặc uốn cong thanh trượt;
-
lỗi vận hành do tải;
-
hệ số chuyển đổi tương đối nhỏ;
-
ngưỡng độ nhạy cao;
-
sự hiện diện của tiếng ồn;
-
tính nhạy cảm với xói mòn điện dưới ảnh hưởng của xung phóng điện.

Đặc tính tĩnh của cảm biến chiết áp
Đặc tính tĩnh của cảm biến đo điện thế không thuận nghịch
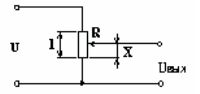
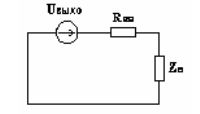
Chúng ta hãy xem xét một ví dụ về cảm biến chiết áp với một cuộn dây liên tục. Một điện áp AC hoặc DC U được đặt vào các cực của chiết áp. Giá trị đầu vào là độ dịch chuyển X, giá trị đầu ra là điện áp Uout. Đối với chế độ không tải, đặc tính tĩnh của cảm biến là tuyến tính vì mối quan hệ là đúng: Uout = (U / R) r,
trong đó R là điện trở cuộn dây; r là điện trở của một phần của cuộn dây.
Cho rằng r / R = x / l, trong đó l là tổng chiều dài của cuộn dây, chúng ta có Uout = (U / l) x = Kx [V / m],
trong đó K là hệ số chuyển đổi (truyền) của cảm biến.
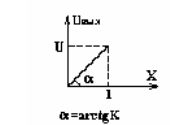
Rõ ràng, một cảm biến như vậy sẽ không phản ứng với sự thay đổi dấu hiệu của tín hiệu đầu vào (cảm biến không thể đảo ngược). Có những kế hoạch nhạy cảm với những thay đổi trong chữ ký. Đặc tính tĩnh của một cảm biến như vậy có dạng như trong hình.
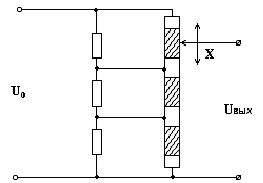
Mạch đảo chiều của cảm biến chiết áp
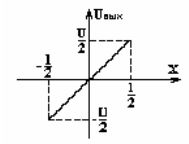
Đặc tính tĩnh của cảm biến chiết áp thuận nghịch
Các đặc điểm lý tưởng thu được có thể khác biệt đáng kể so với đặc điểm thực do có nhiều loại lỗi khác nhau:
1. Vùng chết.
Điện áp đầu ra thay đổi một cách riêng biệt từ lượt này sang lượt khác, tức là vùng này xảy ra khi, đối với một giá trị đầu vào nhỏ, Uout không thay đổi.
Độ lớn của bước nhảy điện áp được xác định theo công thức: DU = U / W, trong đó W là số vòng dây.
Ngưỡng độ nhạy được xác định bởi đường kính của dây cuộn: Dx = l/W.
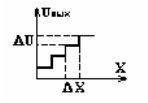
Cảm biến điện thế cho dải chết
2. Đặc tính tĩnh không đều do sự thay đổi của đường kính dây, điện trở và bước cuộn dây.
3. Lỗi do phản ứng dữ dội xảy ra giữa trục quay của động cơ và ống lót dẫn hướng (lò xo nén được sử dụng để giảm nó).
4.Lỗi do ma sát.
Ở công suất thấp của phần tử điều khiển bàn chải của cảm biến chiết áp, vùng ngưng trệ có thể xảy ra do ma sát.
Áp lực bàn chải phải được điều chỉnh cẩn thận.
5. Lỗi do ảnh hưởng tải trọng.
Tùy thuộc vào bản chất của tải, lỗi xảy ra, cả ở chế độ tĩnh và động. Với tải hoạt động, đặc tính tĩnh thay đổi. Giá trị điện áp ra sẽ được xác định theo biểu thức: Uout = (UrRn)/(RRn + Rr-r2)
Những cái này. Uout = f(r) phụ thuộc vào Rn. Với Rn >> R có thể chỉ ra rằng Uout = (U / R) r;
khi Rn xấp xỉ bằng R thì sự phụ thuộc là phi tuyến tính và sai số lớn nhất của cảm biến sẽ là khi con trượt lệch khỏi (2/3))l. Thường chọn Rн / R = 10 … 100. Độ lớn của sai số tại x = (2/3) l có thể được xác định bằng biểu thức: E = 4/27η, trong đó η= Rн / R — hệ số tải.
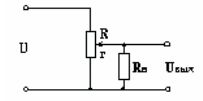
Cảm biến điện thế dưới tải
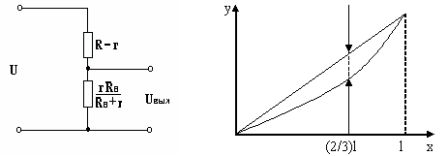 a — Mạch tương đương của cảm biến đo điện thế có tải, b — Ảnh hưởng của tải đối với đặc tính tĩnh của cảm biến đo điện thế.
a — Mạch tương đương của cảm biến đo điện thế có tải, b — Ảnh hưởng của tải đối với đặc tính tĩnh của cảm biến đo điện thế.
Đặc tính động của cảm biến chiết áp
chức năng truyền
Để lấy được hàm truyền, sẽ thuận tiện hơn khi lấy dòng tải làm giá trị đầu ra; nó có thể được xác định bằng cách sử dụng định lý trình tạo tương đương. B = Uout0 / (Rvn + Zn)
Hãy xem xét hai trường hợp:
1. Tải thuần hoạt Zn = Rn vì Uout0 = K1x In = K1x/(Rin + Rn)
trong đó K1 là tốc độ không tải của cảm biến.
Áp dụng phép biến đổi Laplace ta thu được hàm truyền W(p) = In(p)/X(p) = K1/(Rin + Rn) = K
Bằng cách này, chúng tôi thu được kết nối không quán tính, có nghĩa là cảm biến có tất cả các đặc tính tần số và thời gian tương ứng với kết nối này.
Mạch tương đương
2. Tải cảm ứng với một thành phần hoạt động.
U = RvnIn + L (dIn / dt) + RnIn
Áp dụng biến đổi Laplace ta được Uoutx(p) = In(p) [(Rvn + pL) + Rn]
Thông qua các phép biến đổi, người ta có thể đi đến một hàm truyền có dạng W (p) = K / (Tp + 1) — một kết nối tuần hoàn bậc 1,
trong đó K = K1 / (Rvn + Rn)
T = L/(Rvn + Rn);
Tiếng ồn bên trong của cảm biến chiết áp
 Như được hiển thị, khi bàn chải di chuyển từ lượt này sang lượt khác, điện áp đầu ra thay đổi đột ngột. Lỗi được tạo bởi bước là ở dạng điện áp răng cưa được đặt chồng lên điện áp đầu ra của hàm truyền, tức là là tiếng ồn. Nếu bàn chải rung, chuyển động cũng tạo ra tiếng ồn (nhiễu). Phổ tần số của tiếng ồn rung động nằm trong dải tần số âm thanh.
Như được hiển thị, khi bàn chải di chuyển từ lượt này sang lượt khác, điện áp đầu ra thay đổi đột ngột. Lỗi được tạo bởi bước là ở dạng điện áp răng cưa được đặt chồng lên điện áp đầu ra của hàm truyền, tức là là tiếng ồn. Nếu bàn chải rung, chuyển động cũng tạo ra tiếng ồn (nhiễu). Phổ tần số của tiếng ồn rung động nằm trong dải tần số âm thanh.
Để loại bỏ rung động, pantograph được làm bằng một số dây có độ dài khác nhau được gấp lại với nhau. Sau đó, tần số tự nhiên của mỗi dây sẽ khác nhau, điều này ngăn cản sự xuất hiện của cộng hưởng kỹ thuật. Mức độ nhiễu nhiệt thấp, chúng được tính đến trong các hệ thống đặc biệt nhạy cảm.
Chức năng cảm biến chiết áp
Cần lưu ý rằng trong tự động hóa, các hàm truyền hàm thường được sử dụng để thu được các phụ thuộc phi tuyến, chúng được xây dựng theo ba cách:
-
thay đổi đường kính của dây dọc theo cuộn dây;
-
thay đổi cường độ cuộn dây;
-
việc sử dụng một khung với một cấu hình nhất định;
-
bằng cách điều động các phần của chiết áp tuyến tính với các điện trở có kích thước khác nhau.
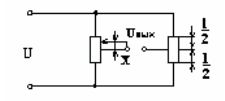
Ví dụ, để có được sự phụ thuộc bậc hai theo phương pháp thứ ba, cần phải thay đổi chiều rộng của khung một cách tuyến tính, như thể hiện trong hình.
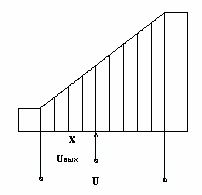
Cảm biến chiết áp chức năng
Chiết áp đa vòng
Cảm biến chiết áp thông thường có phạm vi hoạt động hạn chế. Giá trị của nó được xác định bởi kích thước hình học của khung và số vòng quay của cuộn dây. Chúng không thể tăng vô hạn. Do đó, các cảm biến chiết áp nhiều vòng đã tìm thấy ứng dụng, trong đó một phần tử điện trở được xoắn theo đường xoắn ốc với nhiều vòng, trục của chúng phải được quay nhiều lần để động cơ di chuyển từ đầu này sang đầu kia của cuộn dây, tức là. phạm vi điện của các cảm biến như vậy là bội số của 3600.
Ưu điểm chính của chiết áp nhiều vòng là độ phân giải và độ chính xác cao, đạt được do chiều dài lớn của phần tử điện trở với kích thước tổng thể nhỏ.
Máy đo quang điện thế
Máy đo quang điện — là một thiết bị tương tự không tiếp xúc của chiết áp thông thường có lớp điện trở, tiếp xúc cơ học trong nó được thay thế bằng tiếp xúc quang dẫn, tất nhiên, điều này làm tăng độ tin cậy và tuổi thọ của dịch vụ. Tín hiệu từ máy đo quang điện được điều khiển bởi một đầu dò ánh sáng hoạt động như một thanh trượt. Nó được hình thành bởi một thiết bị quang học đặc biệt và có thể bị dịch chuyển do tác động cơ học bên ngoài dọc theo lớp quang dẫn. Tại điểm tiếp xúc với lớp quang điện, hiện tượng quang dẫn dư thừa (so với vùng tối) xảy ra và tạo ra một tiếp xúc điện.
Máy đo quang điện được chia theo mục đích thành tuyến tính và chức năng.
Máy đo quang điện chức năng cho phép chuyển đổi chuyển động không gian của nguồn sáng thành tín hiệu điện với dạng chức năng nhất định do lớp điện trở định hình (hyperbolic, hàm mũ, logarit).