Cảm biến các thông số công nghệ — lực, áp suất, mô-men xoắn
Để thực hiện kiểm soát tự động và có độ chính xác cao đối với các quy trình công nghệ, bạn luôn cần có sẵn thông tin về các giá trị hiện tại của các tham số công nghệ chính. Thông thường, các cảm biến khác nhau được sử dụng cho mục đích này: lực, áp suất, mô-men xoắn, v.v. Hãy xem xét ba loại cảm biến, hãy hiểu nguyên lý hoạt động của chúng.

Trước hết, chúng tôi lưu ý rằng trong việc xây dựng các cảm biến lực hoặc mô-men xoắn, các phần tử nhạy cảm được sử dụng, một số tính chất nhất định thay đổi theo mức độ biến dạng hiện tại do một hoặc một tác động bên ngoài khác.
Đây có thể là các tấm kim loại đàn hồi, lò xo hoặc trục, biến dạng của chúng được truyền đến một phần tử từ giảo, áp điện hoặc bán dẫn, có các tham số điện hoặc từ sẽ phụ thuộc trực tiếp vào mức độ biến dạng. Chỉ cần đo tham số này là đủ để biết được kích thước của biến dạng và theo đó, của lực (áp suất, mô-men xoắn).
Máy đo biến dạng tensometric

Máy đo biến dạng đơn giản nhất dựa trên bộ chuyển đổi dây đo sức căng bao gồm một phần tử đàn hồi cơ học chịu biến dạng và một máy đo biến dạng được gắn vào nó, sự biến dạng của nó được chuyển đổi trực tiếp thành tín hiệu điện.
Một dây nichrom, constantan hoặc ellinvar mỏng (có đường kính từ 15 đến 60 micron), được gấp lại bằng một con rắn và cố định trên lớp nền phim, hoạt động như một cảm biến đo biến dạng. Một đầu dò như vậy được dán vào bề mặt cần đo biến dạng.
Sự biến dạng của phần tử đàn hồi cơ học dẫn đến dây kéo dài hoặc nén dọc theo chiều dài của nó, đồng thời tiết diện của nó giảm hoặc tăng, điều này ảnh hưởng đến sự thay đổi điện trở của bộ chuyển đổi thành dòng điện.
Bằng cách đo điện trở này (điện áp rơi trên nó), chúng ta biết được cường độ của biến dạng cơ học và theo đó là lực, với điều kiện là đã biết các thông số cơ học của phần tử bị biến dạng.
Cảm biến mô-men xoắn đo áp suất

Để đo mômen lực, người ta sử dụng các phần tử đàn hồi nhạy cảm ở dạng lò xo hoặc trục mỏng, được xoắn trong quá trình công nghệ. Biến dạng góc đàn hồi, nghĩa là góc tương đối của điểm đầu và điểm cuối của lò xo, được đo và chuyển đổi thành tín hiệu điện.
Phần tử đàn hồi thường được đặt trong một ống, một đầu được cố định cố định và đầu kia được nối với cảm biến dịch chuyển góc để đo góc phân kỳ giữa các đầu của ống và phần tử biến dạng.
Do đó, một tín hiệu thu được mang thông tin về độ lớn của mô-men xoắn.Để loại bỏ tín hiệu khỏi lò xo, các dây của phần tử điện trở biến dạng được kết nối bằng các vòng trượt với bàn chải.
Cảm biến lực từ giảo
Ngoài ra còn có các cảm biến lực với đầu dò từ giảo biến dạng. Được sử dụng ở đây hiện tượng từ giảo ngược (hiệu ứng Villari), bao gồm thực tế là khi áp suất tác dụng lên lõi làm bằng hợp kim sắt-niken (chẳng hạn như permaloid), tính thấm từ của nó sẽ thay đổi.
Nén dọc của lõi dẫn đến mở rộng vòng trễ của nó, độ dốc của vòng giảm, dẫn đến giảm giá trị của độ thấm từ tương ứng — giảm độ tự cảm hoặc độ tự cảm lẫn nhau của cuộn dây cảm biến.
Vì các đặc tính từ tính là phi tuyến tính và cũng do thực tế là chúng bị ảnh hưởng đáng kể bởi nhiệt độ, nên cần phải sử dụng mạch bù.
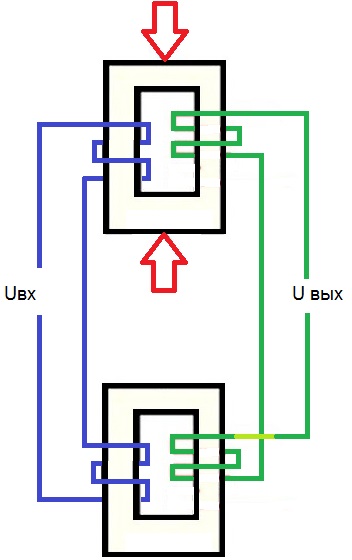
Đề án chung sau đây áp dụng cho bồi thường. Một lõi từ tính khép kín làm bằng ferit niken-kẽm phải chịu một lực có thể đo được. Một lõi như vậy không chịu áp suất lực, nhưng các cuộn dây của hai dây được kết nối với nhau, do đó xảy ra sự thay đổi trong tổng EMF.
Các cuộn sơ cấp giống hệt nhau và được mắc nối tiếp, chúng được cấp nguồn bằng dòng điện xoay chiều có tần số trong vòng mười kilohertz, trong khi các cuộn thứ cấp (cũng giống nhau) được bật ngược chiều và trong trường hợp không có lực biến dạng, tổng EMF là 0. Nếu áp suất trên lõi đầu tiên tăng lên, thì tổng EMF ở đầu ra khác không và tỷ lệ với độ biến dạng.