Kiểm soát mực nước bể sử dụng rơ le lập trình OWEN PR110
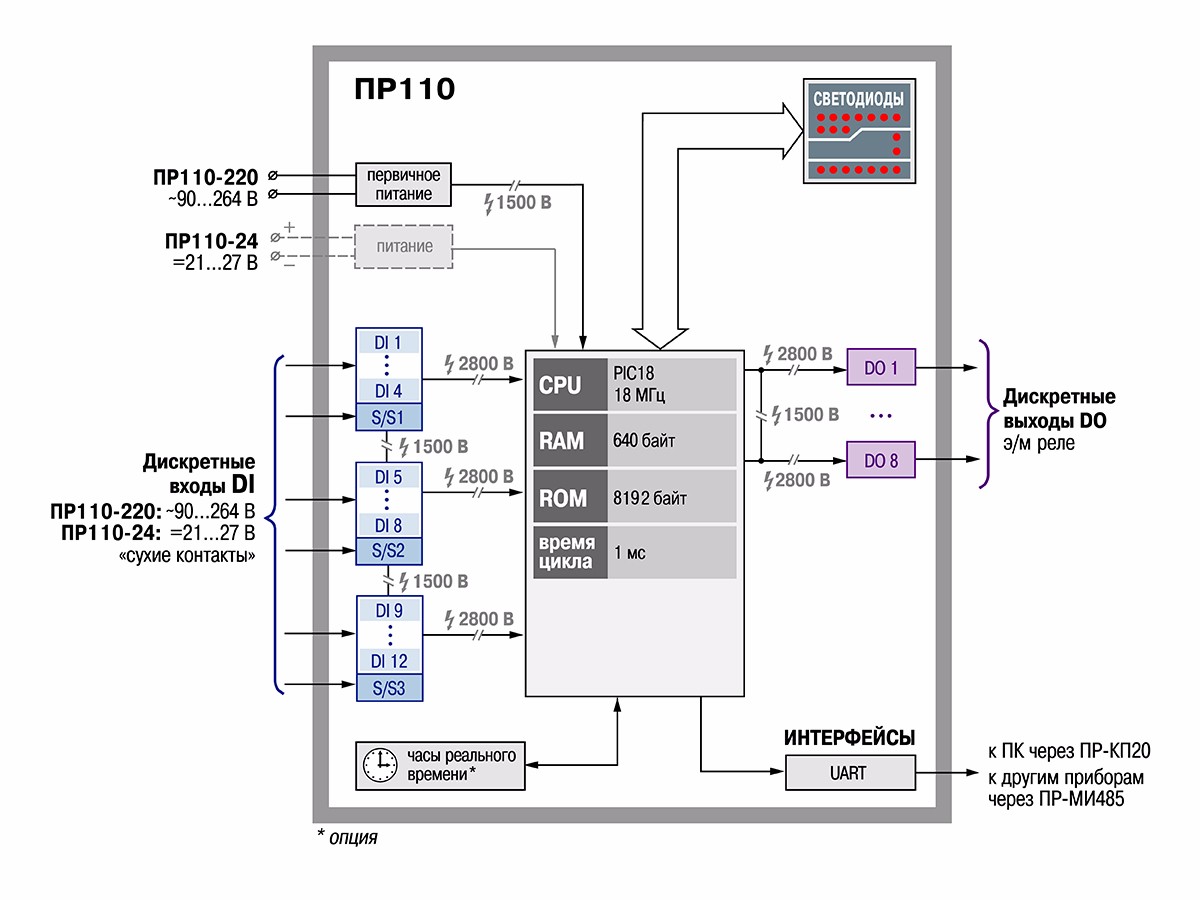
Bộ điều khiển PR110 được sản xuất bởi công ty «OWEN» của Nga. Bộ điều khiển chỉ thực hiện các hoạt động trên các tín hiệu rời rạc — mục đích chính của nó là thay thế các hệ thống điều khiển đơn giản dựa trên logic rơle. Điều này xác định thực tế là nó (cũng như các bộ điều khiển khác có chức năng tương tự) được gán tên «rơle khả trình».

Sơ đồ chức năng rơle lập trình ARIES PR110:
Công cụ chính và duy nhất để lập trình và gỡ lỗi phần mềm điều khiển là máy tính cá nhân. Với sự trợ giúp của nó, bạn không chỉ có thể tạo phần mềm của bộ điều khiển tương ứng mà còn có thể quan sát cách thức hoạt động của nó bằng mô phỏng máy tính.

Chúng ta sẽ xem xét quá trình tạo chương trình điều khiển chuyển mạch cho rơle lập trình PR110 bằng ví dụ về hệ thống điều khiển mực nước trong bể.
điều kiện kỹ thuật
Cần phải thực hiện một hệ thống kiểm soát để đổ đầy nước vào bể. Hiệu suất của một số chức năng được xác định bởi trạng thái của cảm biến mức, một số chức năng do người vận hành. Cần có một dấu hiệu ánh sáng về trạng thái hệ thống hiện tại.
Thuật toán điều khiển như sau. Có ba cảm biến xác định mực nước hiện tại trong bể: trên, giữa và dưới. Mỗi cảm biến được kích hoạt (xuất ra một mức đơn vị logic ở đầu ra) khi nước vượt quá mức tương ứng.
Điều khiển thủ công được thực hiện bằng hai nút: «Bắt đầu» và «Dừng». Khi bể trống (mực nước nằm dưới các cảm biến mức thấp hơn), đèn báo màu đỏ phải ổn định, khi đầy (cao hơn mức trên), đèn sẽ có màu xanh lá cây ổn định. Hai máy bơm được điều khiển.
Có thể khởi động máy bơm nếu bể chứa không đầy (mực nước thấp hơn mức trên cùng). Nếu bằng cách nhấn nút «Bắt đầu», mực nước dưới mức trung bình - cả hai máy bơm đều được khởi động, nếu bằng cách nhấn nút «Bắt đầu», mực nước cao hơn mức trung bình - thì một máy bơm được khởi động.
Bật máy bơm đi kèm với đèn báo màu xanh lá cây nhấp nháy. Khi bể chứa đầy (mực nước đạt mức trên), máy bơm sẽ tự động tắt. Nếu bể trống (mực nước thấp hơn mức thấp hơn), không thể tắt máy bơm bằng cách nhấn nút «Dừng».
Ví dụ tạo chương trình trong OWEN Logic
Để thực hiện nhiệm vụ này, máy điều khiển phải có năm đầu vào rời rạc và bốn đầu ra rơ le. Để giải quyết vấn đề này, chúng tôi sẽ đưa ra các quyết định sau đây.
Kết nối cảm biến mức nước bể dưới với đầu vào I1, cảm biến mức giữa với đầu vào I2 và cảm biến mức trên với đầu vào I3.Kết nối nút Dừng với đầu vào I4 và nút Bắt đầu với đầu vào I5. Chúng tôi sẽ kiểm soát việc đưa vào máy bơm số 1 với sự trợ giúp của đầu ra Q1, việc đưa vào máy bơm số 2 — với sự trợ giúp của đầu ra Q2. Kết nối đèn báo màu đỏ với đầu ra Q3, đèn báo màu xanh lá cây với đầu ra Q4.
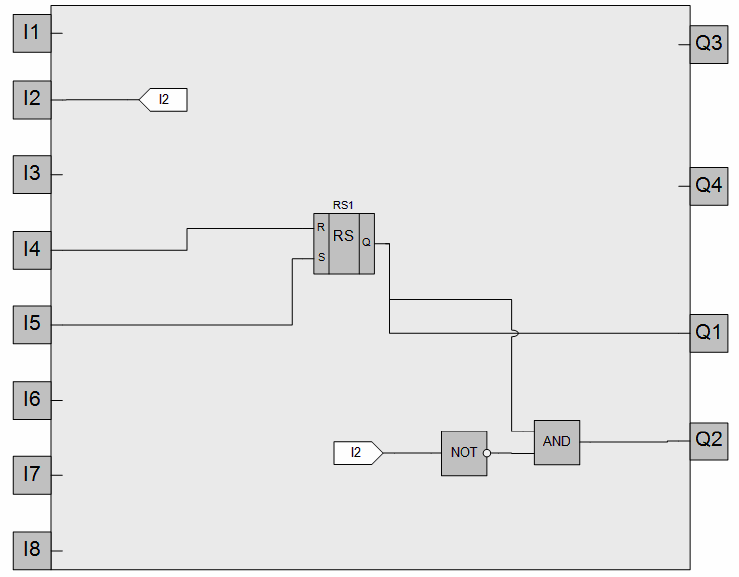
Điều khiển thủ công được thực hiện bằng các nút tạo tín hiệu điều khiển ngắn hạn. Để hệ thống điều khiển duy trì ở trạng thái mà chúng tôi sẽ chuyển nó bằng tín hiệu ngắn hạn từ nút này hoặc nút khác, cần có một bộ kích hoạt trong chương trình.
Hãy giới thiệu flip-flop RS1 vào chương trình. Đầu ra của flip-flop này được đặt thành 1 khi một cạnh dương đến đầu vào S và đặt lại về 0 khi một cạnh dương đến đầu vào R. Cần lưu ý rằng khi một tín hiệu đến đầu vào, tín hiệu đầu vào R được ưu tiên.
Nếu mực nước trong bình cao hơn mức trên hoặc chúng ta đã nhấn và giữ nút “Dừng” ở trạng thái này thì lúc đó nhấn nút “Khởi động” thì không nên bật máy bơm. Do đó, nút «Bắt đầu» được kết nối với đầu vào S với mức ưu tiên thấp hơn của flip-flop RS1. Sau đó, nếu không có điều kiện nào ngăn máy bơm bật (tức là sẽ có logic 0 ở đầu vào R của bộ kích hoạt RS1), khi nhấn nút «Bắt đầu», đầu ra của bộ kích hoạt RS1 sẽ được đặt thành một. Tín hiệu này sẽ được sử dụng để kích hoạt các động cơ.
Trong số hai máy bơm, máy bơm số 1 phải được bật trong mọi trường hợp, vì vậy tín hiệu từ đầu ra kích hoạt RS1 được kết nối với đầu ra Q1. Máy bơm số 2 chỉ nên bật nếu cảm biến mức trung bình không bị ngắt. Để đáp ứng điều kiện này, chúng tôi đưa biến tần và phần tử logic AND vào chương trình.Đầu vào của biến tần được kết nối với đầu vào I2, đầu vào của phần tử logic AND với đầu ra của biến tần và với đầu ra của bộ kích hoạt RS1, tương ứng.
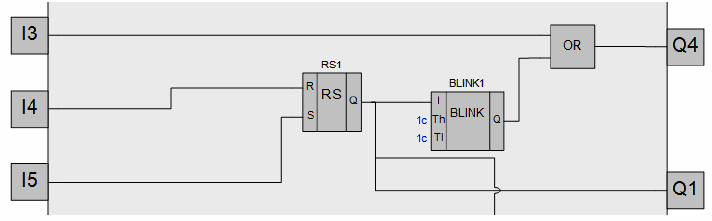
Việc bật máy bơm phải đi kèm với đèn báo màu xanh lá cây nhấp nháy. Để tạo tín hiệu định kỳ để bật / tắt chỉ báo màu xanh lá cây, chúng tôi đưa bộ tạo sóng vuông BLINK1 vào chương trình. Trong tab thuộc tính của khối này, hãy đặt thời lượng của tín hiệu một và không ở đầu ra của nó bằng nhau và bằng 1 giây. Kết nối đầu ra của bộ kích hoạt RS1 với đầu vào kích hoạt hoạt động của bộ tạo BLINK1.
Bây giờ bộ tạo BLINK1 sẽ chỉ hoạt động khi đầu ra kích hoạt RS1 được đặt thành một tức là. khi các máy bơm được kích hoạt. 26 Hãy đưa cổng OR vào chương trình. Chúng tôi kết nối đầu ra của nó với đầu ra của Q4. Chúng tôi kết nối một đầu vào của cổng OR với đầu ra của bộ tạo BLINK1, đầu vào còn lại với đầu vào I3. Bây giờ, khi bật máy bơm, đèn báo màu xanh lá cây sẽ nhấp nháy, nhưng nếu cảm biến mức cao nhất được kích hoạt, đèn báo này sẽ sáng liên tục.
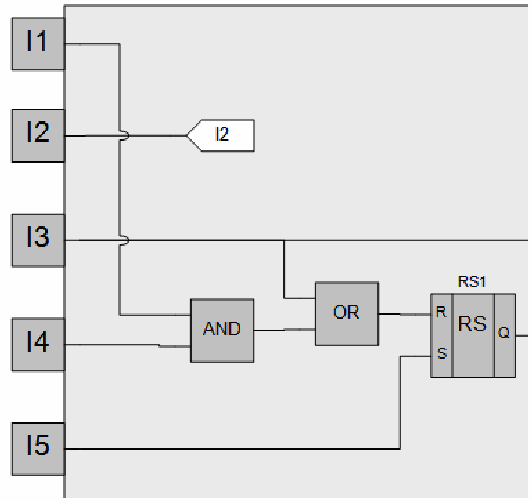
Các máy bơm sẽ bị tắt nếu chúng ta nhấn nút "Dừng" và đồng thời cảm biến mức thấp hơn sẽ ở trạng thái đơn vị logic (có ít nước tối thiểu trong bể) hoặc nếu cảm biến mức cao hơn được kích hoạt ( thùng đã đầy).
Để đáp ứng các điều kiện này, chúng tôi đưa vào chương trình phần tử logic OR và phần tử logic I. Chúng tôi kết nối một đầu vào của phần tử logic AND với nút "Dừng", đầu còn lại với đầu vào I1 (với đầu ra của mức thấp hơn cảm biến). Chúng tôi kết nối một đầu vào của phần tử OR với đầu ra của phần tử AND, đầu vào còn lại với đầu vào I3 (với đầu ra của cảm biến cấp trên). Đầu ra của phần tử OR được kết nối với đầu vào R của flip-flop RS1.
Đèn báo màu đỏ sẽ sáng lên nếu đồng thời đáp ứng hai điều kiện: máy bơm không hoạt động (có số 0 ở đầu ra của bộ kích hoạt RS1) và mực nước ở dưới mức thấp hơn (không có ở đầu ra của bộ kích hoạt RS1). cảm biến mức thấp hơn).
Để "kiểm tra" các điều kiện này và điều khiển chỉ báo màu đỏ trong chương trình, chúng tôi giới thiệu hai biến tần và phần tử logic I. Đầu vào của một biến tần được kết nối với đầu vào I1 (với đầu ra của cảm biến mức thấp hơn), đầu vào của biến tần khác - với đầu ra kích hoạt RS1). Chúng tôi kết nối đầu ra của bộ biến tần với đầu vào của cổng AND. Đầu ra của cổng AND được nối với đầu ra của Q3.

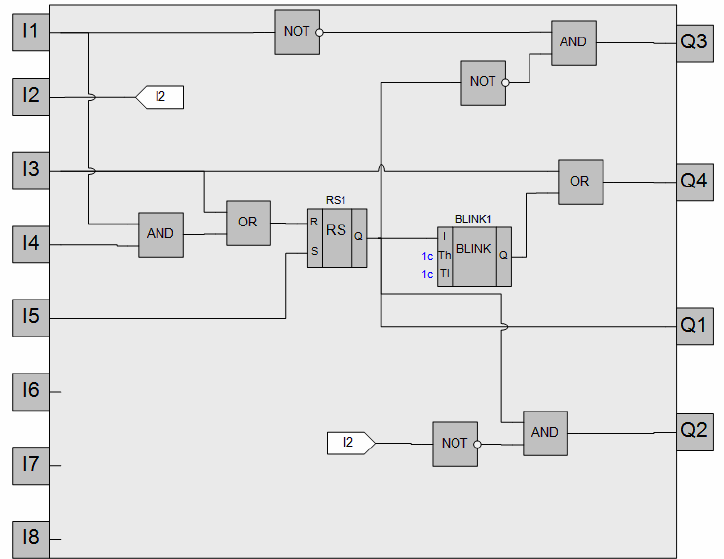
Cuối cùng, nói chung, bạn nên có chương trình được trình bày dưới đây. Hình minh họa sơ bộ các mạch bên ngoài được kết nối với rơle có thể lập trình.
Sử dụng chế độ mô phỏng của môi trường lập trình OWEN Logic, đảm bảo chương trình hoạt động theo đúng tác vụ ban đầu. Sau khi nạp chương trình vào rơ le đảm bảo như cũ.