Tín hiệu tương tự thống nhất trong các hệ thống tự động hóa
Khi chúng ta tạo một hệ thống tự động hóa cho một quy trình công nghệ nhất định, bằng cách nào đó, chúng ta cần kết nối các cảm biến và các thiết bị tín hiệu khác - với bộ truyền động, với bộ chuyển đổi, với bộ điều khiển, v.v. của điện áp hoặc dòng điện có độ lớn nhất định (trong trường hợp tín hiệu tương tự) hoặc ở dạng xung có tham số thời gian nhất định (trong trường hợp tín hiệu số).
Các tham số của các tín hiệu điện này theo một cách rất xác định nào đó phải tương ứng với các tham số của đại lượng vật lý mà cảm biến cố định, để việc điều khiển thiết bị cuối phù hợp với nhiệm vụ tự động hóa.
Tất nhiên, thuận tiện nhất là hợp nhất các tín hiệu tương tự từ các cảm biến khác nhau để bộ điều khiển có được tính linh hoạt, do đó người dùng không phải chọn loại giao diện riêng cho từng cảm biến và cảm biến riêng cho từng giao diện.
Các nhà phát triển đã quyết định để bản chất của các tín hiệu đầu vào-đầu ra trở nên thống nhất, vì với cách tiếp cận này, việc phát triển các hệ thống tự động hóa và khối tự động hóa cho ngành công nghiệp sẽ được đơn giản hóa rất nhiều và việc khắc phục sự cố, bảo trì và hiện đại hóa thiết bị sẽ trở nên dễ dàng hơn nhiều - linh hoạt. Ngay cả khi một cảm biến bị lỗi, bạn không cần phải tìm chính xác cảm biến đó, chỉ cần chọn một tín hiệu tương tự với các tín hiệu đầu ra tương ứng là đủ.
Các phép đo nhiệt độ môi trường xung quanh, tốc độ động cơ, áp suất chất lỏng, ứng suất cơ học mẫu, độ ẩm không khí, v.v. — thường được thực hiện bằng cách xử lý các tín hiệu tương tự liên tục nhận được từ các cảm biến liên quan, trong khi hoạt động liên tục của thiết bị được kết nối được tự động hiệu chỉnh: bộ phận gia nhiệt, bộ biến tần, máy bơm, máy nén, v.v.
Tín hiệu tương tự phổ biến nhất là tín hiệu điện áp nằm trong khoảng từ 0 đến 10 V hoặc tín hiệu dòng điện nằm trong khoảng từ 4 đến 20 mA.
Điều khiển điện áp từ 0 đến 10 V
Khi tín hiệu điện áp thống nhất từ 0 đến 10 V được sử dụng, thì chuỗi điện áp từ 0 đến 10 V liên tục này được liên kết với một loạt các đại lượng vật lý được đo, chẳng hạn như áp suất hoặc nhiệt độ.
Giả sử rằng nhiệt độ thay đổi từ -30 đến +125°C trong khi điện áp thay đổi từ 0 đến 10V, với 0 vôn tương ứng với nhiệt độ -30°C và 10 vôn tương ứng với +125°C. Đây có thể là nhiệt độ của chất phản ứng hoặc phôi và các giá trị nhiệt độ trung gian sẽ có các giá trị điện áp được xác định nghiêm ngặt trong phạm vi được chỉ định. Ở đây mối quan hệ không nhất thiết là tuyến tính.

Bằng cách này, có thể điều khiển các thiết bị khác nhau cũng như thu thập thông tin giám sát. Ví dụ: bộ tản nhiệt có cảm biến nhiệt có đầu ra tương tự để hiển thị nhiệt độ hiện tại: 0 V — nhiệt độ bề mặt của bộ tản nhiệt là + 25 ° C hoặc thấp hơn, 10 V — nhiệt độ đã đạt + 125 ° C — tối đa cho phép.
Hoặc bằng cách đặt điện áp từ 0 đến 10 V từ bộ điều khiển vào đầu vào tương tự của máy bơm, chúng ta điều chỉnh áp suất khí trong bình chứa: 0 V — áp suất bằng khí quyển, 5 V — áp suất là 2 atm, 10 V — 4 atm Tương tự như vậy, bạn có thể điều khiển các thiết bị sưởi ấm, máy cắt kim loại, van và các phụ kiện và bộ truyền động khác cho các mục đích khác nhau.
Kiểm soát hiện tại (vòng lặp hiện tại 4 đến 20 mA)
Loại tín hiệu tương tự thống nhất thứ hai cho điều khiển tự động hóa là tín hiệu dòng điện 4-20 mA được gọi là «vòng lặp dòng điện». Tín hiệu này cũng được sử dụng để nhận tín hiệu từ các cảm biến khác nhau nhằm điều khiển các biến tần.
Không giống như tín hiệu điện áp, bản chất dòng điện của tín hiệu cho phép tín hiệu được truyền đi mà không bị biến dạng ở khoảng cách xa hơn nhiều, do điện áp đường dây giảm và điện trở được bù tự động. Ngoài ra, rất dễ chẩn đoán tính toàn vẹn của các mạch truyền tải — nếu có dòng điện thì đường dây còn nguyên vẹn, nếu không có dòng điện thì có hở mạch. Vì lý do này, giá trị nhỏ nhất là 4 mA, không phải 0 mA.
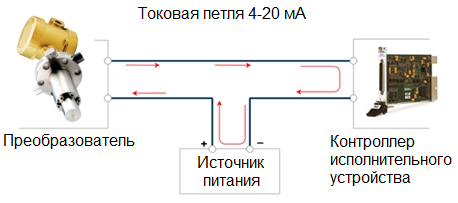
Vì vậy, ở đây một nguồn hiện tại được sử dụng làm nguồn năng lượng cho tín hiệu điều khiển chứ không phải nguồn điện áp. Theo đó, bộ điều khiển truyền động phải có đầu vào dòng điện 4-20 mA và đầu dò cảm biến phải có đầu ra dòng điện.Giả sử bộ biến tần có đầu vào dòng điện điều khiển là 4-20 mA, sau đó khi tín hiệu 4 mA trở xuống được cấp cho đầu vào, biến tần được điều khiển sẽ dừng và khi dòng điện 20 mA được cấp vào, nó sẽ tăng tốc lên hết tốc độ.
Trong khi đó, đầu ra cảm biến hiện tại có thể là chủ động và thụ động. Thông thường, các đầu ra là thụ động, có nghĩa là cần có một nguồn điện bổ sung, được kết nối nối tiếp với cảm biến và bộ điều khiển truyền động. Cảm biến hoặc bộ điều khiển có đầu ra hoạt động không yêu cầu nguồn điện vì nó được tích hợp sẵn.
Vòng lặp dòng điện tương tự ngày nay được sử dụng phổ biến hơn trong kỹ thuật so với tín hiệu điện áp. Nó có thể được sử dụng ở khoảng cách lên đến vài km. Để bảo vệ thiết bị, cách ly điện của các thiết bị quang điện tử như bộ ghép quang được sử dụng. Do sự không hoàn hảo của nguồn hiện tại, chiều dài đường dây tối đa cho phép (và điện trở đường dây tối đa) phụ thuộc vào điện áp mà nguồn hiện tại được cung cấp.
Ví dụ, với điện áp cung cấp điển hình là 12 vôn, điện trở không được vượt quá 600 ôm. Phạm vi của dòng điện và điện áp được mô tả trong GOST 26.011-80 «Đo lường và tự động hóa. Đầu vào và đầu ra của dòng điện và điện áp liên tục».
Công cụ hợp nhất tín hiệu chính - Bộ chuyển đổi chuẩn hóa
Để hợp nhất tín hiệu chính từ cảm biến — để chuyển đổi nó thành điện áp từ 0 đến 10 V hoặc thành dòng điện từ 4 đến 20 mA, cái gọi là chuẩn hóa bộ chuyển đổi… Các bộ chuyển đổi chuẩn hóa này có sẵn cho nhiệt độ, độ ẩm, áp suất, trọng lượng, v.v.

Nguyên lý hoạt động của cảm biến có thể khác nhau: điện dung, điện cảm, điện trở, cặp nhiệt điện, v.v. Tuy nhiên, để thuận tiện cho việc xử lý tín hiệu tiếp theo, đầu ra phải đáp ứng các yêu cầu thống nhất. Đó là lý do tại sao các cảm biến thường được trang bị bộ chuyển đổi tiêu chuẩn của giá trị đo được thành dòng điện hoặc điện áp.