Hệ thống điều khiển tự động đóng
 Các hệ thống điều khiển tự động đóng (ACS) khác với các mạch hở ở thiết bị được sử dụng và ở mức độ tự động hóa hoàn chỉnh. Khi ACS mở, thiết bị chính (bao gồm cả thiết bị điều khiển) không nhận được thông tin về chế độ vận hành thực tế của lắp đặt điện (động cơ lái, máy đang chạy).
Các hệ thống điều khiển tự động đóng (ACS) khác với các mạch hở ở thiết bị được sử dụng và ở mức độ tự động hóa hoàn chỉnh. Khi ACS mở, thiết bị chính (bao gồm cả thiết bị điều khiển) không nhận được thông tin về chế độ vận hành thực tế của lắp đặt điện (động cơ lái, máy đang chạy).
Trong một ASUB đóng, thông tin được truyền đến các phần tử điều khiển, kèm theo việc gửi các tín hiệu lệnh thích hợp. Mạch truyền thông tin như vậy sẽ đóng vòng điều khiển, tạo thành ACS đóng hoặc ACS phản hồi.
Sự khác biệt giữa ACS đóng và mở có thể được giải thích bằng ví dụ về điều khiển tốc độ của động cơ điện trong hệ thống máy phát-động cơ (G-D). Khi ACS mở (Hình 1, a), tốc độ cài đặt của động cơ điện được cài đặt thủ công bằng chiết áp P. Việc điều chỉnh tốc độ được thực hiện trực quan bằng máy đo tốc độ, được cung cấp bởi bộ tạo tốc độ TG. Bất kỳ sai lệch tốc độ nào so với điểm đặt đều được người vận hành loại bỏ bằng cách tác động lên thanh trượt chiết áp.
Trong một ACS kín (Hình.1, b) phần ứng của máy phát tốc TG được bao gồm trong mạch kích thích của máy phát OVG, tạo ra một hệ thống đóng hoặc phản hồi (trong trường hợp này là phản hồi tốc độ).
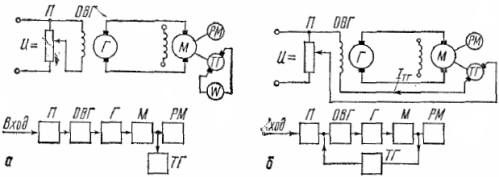
Cơm. 1. Mạch điều khiển động cơ điện trong hệ thống G -M: a — ACS mở, b — ACS đóng
Dòng điện do máy phát điện xoay chiều (Aztg) tạo ra trong mạch kín hướng đến dòng điện của chiết áp (Azn) và dòng điện sinh ra tác dụng trong mạch bằng hiệu hình học của các dòng điện này. Sử dụng thanh trượt của chiết áp, người vận hành đặt giá trị của dòng điện kết quả trong cuộn dây kích thích của OVG, tại đó tốc độ tương ứng của động cơ điện được cung cấp. Đây là nơi mà vai trò của nhà điều hành kết thúc. Trong tương lai, hệ thống sẽ tự động duy trì chế độ hoạt động đã đặt của ổ điện với độ chính xác nhất định.
Giả sử do tải tăng đột biến, tốc độ của động cơ điện đã giảm so với tốc độ quy định. Việc giảm tốc độ đi kèm với việc giảm tương ứng tốc độ của máy phát điện và điện áp ở các cực của nó. Đến lượt nó, điều này sẽ dẫn đến việc giảm dòng điện Aztg trong mạch phản hồi và ở một vị trí nhất định của thanh trượt chiết áp - sự gia tăng dòng điện kết quả trong cuộn dây kích thích của máy phát. Điện áp máy phát và tốc độ động cơ sẽ tăng theo.
Quá trình tăng tốc độ và điện áp sẽ tiếp tục cho đến khi dòng điện trong vòng phản hồi đạt giá trị cài đặt và tốc độ động cơ đạt giá trị cài đặt.
Khi phân tích hệ thống điều khiển tự động, biểu đồ chức năng… Trong bộ lễ phục.Sơ đồ chức năng truyền 2 của ACS, bao gồm các phần tử sau:
1 — thiết bị chính đặt chế độ hoạt động, đưa ra lệnh, bắt đầu xung hoặc tín hiệu,
2 — yếu tố so sánh. Nó bao gồm tín hiệu X1 từ master, tín hiệu X0, xác định tốc độ hoặc mức của giá trị được kiểm soát. Có tính đến tín hiệu từ phần tử phản hồi chính thứ chín, phần tử 2 so sánh các tín hiệu nhận được và gửi tín hiệu đã hiệu chỉnh bổ sung X2,
3 — phần tử biến đổi, op tín hiệu biến nó thành một dạng khác, thuận tiện hơn cho việc truyền tiếp. Ví dụ, tín hiệu X2 được cung cấp dưới dạng áp suất thủy lực (khí nén, cơ khí) và phần tử 3 chuyển đổi nó thành dòng điện. Vì loại biến đổi này có thể cần thêm năng lượng, nên phần tử 3 được kết nối với nguồn năng lượng PE,
4 — thêm phần tử, nó nhận hai tín hiệu: X3 và X8 từ phần tử hiệu chỉnh (phần tử bộ nhớ) 8. Các tín hiệu này được tổng hợp bởi phần tử 4 và gửi đến phần tử tiếp theo,
5 — phần tử khuếch đại, tín hiệu đầu vào X1 có thể yếu và phải được khuếch đại để truyền tiếp theo. Điều này được thực hiện thông qua phần tử 5 được kết nối với nguồn điện PE,
6 — phần tử điều hành, thực hiện tín hiệu nhận được (động cơ điện, rơle điện từ, động cơ servo),
7 — đối tượng điều chỉnh hoặc máy làm việc.
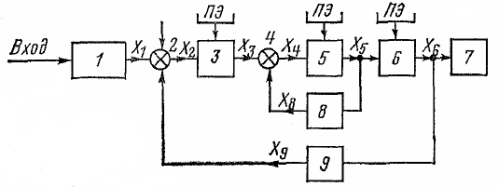
Cơm. 2. Sơ đồ chức năng của ACS
Mỗi phần tử tự động hóa là một bộ chuyển đổi năng lượng, ở đầu vào có giá trị X' được áp dụng và giá trị X được loại bỏ khỏi đầu ra. «Đối với mỗi phần tử ở trạng thái dừng, có một sự phụ thuộc nhất định X» (X'), được gọi là đặc tính tĩnh.
Một hệ thống điều khiển tự động khép kín được đặc trưng bởi sự hiện diện của phản hồi; nó có ít nhất một vòng phản hồi kết nối đầu ra của hệ thống với đầu vào của nó. Ngoài ra, có thể có cái gọi là phản hồi nội bộ, kết nối đầu ra và đầu vào của các phần tử ACS riêng lẻ.
Phản hồi được chia thành cứng và linh hoạt. Các ràng buộc cứng hoạt động ở cả chế độ hoạt động nhất thời và tĩnh của hệ thống, linh hoạt — chỉ ở chế độ nhất thời. Phân biệt phản hồi tích cực và tiêu cực. Khi giá trị quy định tăng lên, kết nối tích cực sẽ tăng lên nhiều hơn và ngược lại, kết nối tiêu cực sẽ giảm. Phản hồi có thể truyền tín hiệu tỷ lệ thuận với góc quay, tốc độ, điện áp, dòng điện, v.v. và được gọi là phản hồi góc, tốc độ, điện áp, dòng điện tương ứng. Để biết thêm chi tiết xem tại đây: Các yếu tố của hệ thống tự động hóa
Theo nguyên tắc hoạt động, ACS có thể được chia thành ba nhóm:
-
hoạt động liên tục trong đó mối quan hệ giữa các giá trị được kiểm soát và cài đặt không bị phá vỡ,
-
hành động xung lực, trong đó kết nối giữa giá trị được kiểm soát và giá trị đặt diễn ra đều đặn,
-
hành động chuyển tiếp trong đó giao tiếp chỉ xảy ra khi một giá trị đạt đến một giá trị nhất định.
Tùy thuộc vào luật theo đó một giá trị nhất định thay đổi theo thời gian, ACS cũng có thể được chia thành ba nhóm:
-
hệ thống điểm đặt thấp hoặc không đổi trong đó giá trị được điều khiển tự động được giữ không đổi. Đây là những hệ thống ổn định, về cơ bản là hệ thống điều khiển tự động (ACS),
-
các hệ thống trong đó giá trị mục tiêu được thay đổi theo một chương trình cụ thể được xác định trước. Nó là một hệ thống quản lý phần mềm,
-
các hệ thống trong đó một giá trị nhất định có thể thay đổi rộng rãi và theo một luật tùy ý, tức là hệ thống theo dõi.