Các thông số và đặc tính cơ bản của rơle điện từ
 Một thiết bị điện áp dụng định luật điều khiển rơle được gọi là rơle... Trong rơle, khi thông số điều khiển (đầu vào) thay đổi trơn tru đến một giá trị cài đặt nhất định, thì thông số điều khiển (đầu ra) thay đổi đột ngột. Ngoài ra, ít nhất một trong các thông số này phải là điện.
Một thiết bị điện áp dụng định luật điều khiển rơle được gọi là rơle... Trong rơle, khi thông số điều khiển (đầu vào) thay đổi trơn tru đến một giá trị cài đặt nhất định, thì thông số điều khiển (đầu ra) thay đổi đột ngột. Ngoài ra, ít nhất một trong các thông số này phải là điện.
Hoạt động của các cơ quan chức năng rơle điện từ có thể được truy tìm theo sơ đồ trong hình. 1. Thân nhận A chuyển đổi giá trị đầu vào (điện áp) Uin cung cấp cho cuộn dây 2 của mạch từ 1 thành giá trị trung gian, tức là trong lực cơ học của neo 3. Lực cơ học của neo FЯ tác dụng lên hệ thống tiếp xúc của cơ quan chấp hành B. Giá trị trung gian — lực của neo FЯ, tỷ lệ với giá trị đầu vào Uin, được so sánh với a giá trị đã cho của lực Fpr do lò xo 9 của vật trung gian sinh ra B. Khi Uin < Uav thì Fya
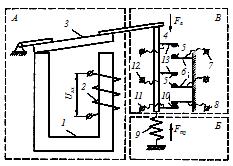 Cơm. 1 Sơ đồ rơle điện từ
Cơm. 1 Sơ đồ rơle điện từ
Trong quá trình hoạt động, rơle điện từ trên thang thời gian phân biệt bốn giai đoạn: khoảng thời gian (thời gian) tác động tav, khoảng thời gian làm việc hai lần, khoảng thời gian (thời gian) tắt máy, khoảng thời gian (thời gian) nghỉ ngơi tp (Hình . 2).
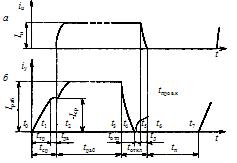
Cơm. 2. Sự phụ thuộc của số lượng đầu ra (a) và đầu ra (b) vào thời gian
Thời gian tác động của rơle điện từ
 Khoảng thời gian đáp ứng bao gồm khoảng thời gian kể từ thời điểm tín hiệu đầu vào bắt đầu tác động đến thiết bị giám sát cho đến khi tín hiệu xuất hiện trong mạch được điều khiển. Đoạn của trục hoành tav = t2 –t0 tương ứng với khoảng thời gian này trong hình. 2, b. Tại thời điểm t0, dòng điện trong cuộn dây rơle tăng đến giá trị tại đó lực điện từ Fe tác dụng lên phần ứng bắt đầu chống lại lực lò xo Fm (lực cơ học) của phần trung gian. Giá trị đầu vào sau đó được gọi là giá trị chấp nhận.
Khoảng thời gian đáp ứng bao gồm khoảng thời gian kể từ thời điểm tín hiệu đầu vào bắt đầu tác động đến thiết bị giám sát cho đến khi tín hiệu xuất hiện trong mạch được điều khiển. Đoạn của trục hoành tav = t2 –t0 tương ứng với khoảng thời gian này trong hình. 2, b. Tại thời điểm t0, dòng điện trong cuộn dây rơle tăng đến giá trị tại đó lực điện từ Fe tác dụng lên phần ứng bắt đầu chống lại lực lò xo Fm (lực cơ học) của phần trung gian. Giá trị đầu vào sau đó được gọi là giá trị chấp nhận.
Chu kì ban đầu ứng với đoạn ttr = t1—t0. Tại thời điểm t1, phần ứng của rơ le nam châm điện bắt đầu chuyển động. Trong thời gian tdv = t2 — t1, mỏ neo di chuyển, vượt qua lực cản của phần thân trung gian B (xem Hình 1) và kích hoạt phần thân điều hành C.
Khi kết thúc hành trình phần ứng, các tiếp điểm truyền động đóng lại, dòng tải trong (Hình 2, a) bắt đầu tăng từ 0 đến giá trị cân bằng. Giá trị đầu vào mà tại đó sự điều khiển của mạch đầu ra bắt đầu được gọi là giá trị chấp nhận (Iav). Công suất Psr tương ứng với Isr được gọi là công suất tác dụng.
Thời gian đáp ứng t cf = ttr + tdv.
Thời gian đáp ứng của rơle điện từ thay đổi từ 1-2 đến 20 ms. Rơle thời gian điện từ cung cấp độ trễ lên tới 10 giây.
Để ước tính thời gian đáp ứng của rơle, cho phép sử dụng biểu thức
t cf = t1kz-bm –a,
trong đó t1 là thời gian đáp ứng đối với hệ số an toàn ks cho trước và hệ số m = 1; a, b — các hệ số được xác định tùy thuộc vào loại rơle và các giá trị của kz và m.
Đối với rơle tốc độ cao ở kz = 1,5¸2, giá trị của hệ số a tiến dần đến đơn vị. Đối với rơle thông thường có k z = 1,5¸3, giá trị a = 0,25¸0,95, giá trị của hệ số b thường trong khoảng 1,4-1,6.
Thời gian hoạt động của rơ le điện từ
 Khoảng thời gian làm việc bao gồm khoảng thời gian hairk = t3 — t2, tức là thời gian từ thời điểm điều khiển mạch đầu ra t2 đến thời điểm chấm dứt tác động lên cơ quan nhạy cảm của tín hiệu đầu vào t3. Dòng điện bắt đầu tăng lên giá trị cố định của Iwork (Hình 2, b) — đây là giá trị làm việc của giá trị đầu vào, đảm bảo hoạt động đáng tin cậy của rơle.
Khoảng thời gian làm việc bao gồm khoảng thời gian hairk = t3 — t2, tức là thời gian từ thời điểm điều khiển mạch đầu ra t2 đến thời điểm chấm dứt tác động lên cơ quan nhạy cảm của tín hiệu đầu vào t3. Dòng điện bắt đầu tăng lên giá trị cố định của Iwork (Hình 2, b) — đây là giá trị làm việc của giá trị đầu vào, đảm bảo hoạt động đáng tin cậy của rơle.
Tỷ số Iwork/Icr = kz được gọi là hệ số an toàn lao động.
Để đặc trưng cho khả năng quá tải của phần tử nhạy cảm của rơle, giá trị của đại lượng đầu vào được sử dụng, được gọi là giá trị giới hạn của đại lượng vận hành Ioperating.max.
Giới hạn của giá trị làm việc — đây là giá trị mà cơ quan nhạy cảm có thể chịu được trong một khoảng thời gian chuẩn hóa ngắn. Tuy nhiên, giá trị của giá trị này là không thể chấp nhận được khi rơle đang hoạt động ở chế độ bình thường do điều kiện của độ bền điện hoặc cơ hoặc nhiệt.
Khái niệm công suất điều khiển Ru được sử dụng để đặc trưng cho khả năng chịu tải của truyền động rơle. Công suất điều khiển là công suất trong mạch điều khiển mà biến tần có thể truyền tải trong thời gian dài.
Thời gian ngắt rơ le điện từ
 Khoảng thời gian tắt chứa khoảng thời gian toff = t6 — t3, tức là thời gian từ thời điểm ngừng tác động lên cơ quan nhận cảm t3 đến thời điểm dòng điện trong mạch điều khiển giảm về 0 (Hình 16, a).
Khoảng thời gian tắt chứa khoảng thời gian toff = t6 — t3, tức là thời gian từ thời điểm ngừng tác động lên cơ quan nhận cảm t3 đến thời điểm dòng điện trong mạch điều khiển giảm về 0 (Hình 16, a).
Khoảng thời gian tắt bao gồm khoảng thời gian nhả totp = t4 — t3 trong đó rơle tắt. Dòng điện iy trong cuộn dây rơle giảm xuống 0 (Hình 2, b). Trong giai đoạn này, lực lò xo đối nghịch (lực cơ học) vượt quá lực điện từ, tức là Fm>Fe và phần ứng được giải phóng.
Sau khi chọn lỗi tiếp điểm (khoảng thời gian tc = t5 — t4), các tiếp điểm rơle mở và một hồ quang được đốt cháy giữa chúng, hồ quang sẽ tắt sau thời gian td = t6 — t5. Trong khoảng thời gian td, dòng điện trong mạch điều khiển giảm từ In xuống 0 (Hình 2, a).
Thời gian tắt t t = tp + tc + td.
Khoảng thời gian ngắt được đặc trưng bởi một hệ số phục hồi, là tỷ số của dòng điện giảm Iotp với dòng điện nạp Iav: kv = Iotp / Icr.
Thông thường, đối với rơle bảo vệ hệ thống điện và rơle điều khiển điều khiển tham số đầu vào trong giới hạn hẹp, kv phải gần bằng nhau hơn.
Thời gian nghỉ của rơle điện từ
Khoảng thời gian nghỉ là khoảng thời gian tp = t7—t6.
Khoảng thời gian trễ được đặc trưng bởi một tham số gọi là giá trị không hoạt động, là giá trị lớn nhất của đại lượng đầu vào đảm bảo rằng rơle không hoạt động hoặc bị giữ. Thời gian tắt máy ngắn hơn thời gian khởi động vận hành và thời gian giải phóng.
Tỷ lệ giữa công suất điều khiển và công suất truyền động được gọi là độ lợi, ku = Py / Pcr.
Số lần bắt đầu trên mỗi đơn vị thời gian được xác định bởi một giá trị tỷ lệ nghịch với thời gian chu kỳ:
f = 1 / tq = 1 / (Tsrab +Trob + Toff +TNS)
Lakota O.B.