Sơ đồ kết nối cảm biến
Sơ đồ kết nối của các cảm biến, thường được gọi là mạch đo, được thiết kế để chuyển đổi giá trị đầu ra của cảm biến và trong hầu hết các trường hợp, đây là sự thay đổi điện trở trong của chúng thành giá trị thuận tiện hơn cho lần sử dụng tiếp theo. Theo quy định, đây là dòng điện hoặc sự thay đổi điện áp có thể được xác định trực tiếp bằng thiết bị đo điện hoặc sau khi được khuếch đại, đưa đến bộ truyền động hoặc thiết bị ghi phù hợp.

Đối với những mục đích này, các sơ đồ chuyển đổi sau đây được sử dụng rộng rãi:
-
nhất quán,
-
Vỉa hè,
-
khác biệt,
-
bù trừ.
sơ đồ mạch tuần tự bao gồm nguồn DC hoặc AC, chính cảm biến Rx, thiết bị đo hoặc cơ chế truyền động trực tiếp và thường là điện trở bổ sung Rd giới hạn dòng điện trong mạch này (Hình 1). Mạch chuyển mạch như vậy thường chỉ được sử dụng rộng rãi với các cảm biến tiếp xúc có Rx = 0 hoặc Rx = ?.
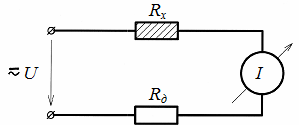
Cơm. 1. Mạch nối tiếp nối các cảm biến
Bởi vì khi làm việc với các cảm biến khác trong mạch của thiết bị đo, một dòng điện được xác định bằng biểu thức I = U /(Rx + Rd) luôn chạy và một sự thay đổi nhỏ trong điện trở trong của cảm biến dẫn đến một sự thay đổi rất nhỏ trong dòng điện này. Do đó, phần tối thiểu của thang đo của thiết bị đo được sử dụng và độ chính xác của phép đo thực tế giảm xuống bằng không. Do đó, đối với hầu hết các cảm biến khác, các mạch đo đặc biệt được sử dụng, giúp tăng đáng kể độ nhạy và độ chính xác của phép đo.
được sử dụng phổ biến nhất mạch cầu chuyển mạch, trong đó một hoặc đôi khi một số cảm biến được kết nối theo một cách nhất định cùng với các điện trở bổ sung trong một tứ giác (cái gọi là Cầu Winston), có hai đường chéo (Hình 2). Một trong số chúng, được gọi là đường chéo công suất a-b, được thiết kế để kết nối nguồn DC hoặc AC và đường chéo đo c-d còn lại, bao gồm một thiết bị đo.
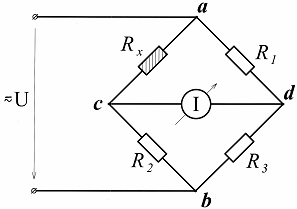
Cơm. 2. Mạch cầu nối các cảm biến
Nếu tích các giá trị điện trở của các cạnh đối diện của tứ giác (các nhánh cầu) bằng nhau Rx x R3 = R1NS R2 thì điện thế của các điểm c và d sẽ bằng nhau và sẽ không có dòng điện trong đường chéo đo. Trạng thái này của mạch cầu thường được gọi là cầu cân bằng, I E. mạch cầu cân bằng.
Nếu điện trở của cảm biến Rx thay đổi do tác động bên ngoài, thì sự cân bằng sẽ bị xáo trộn và dòng điện tỷ lệ thuận với sự thay đổi của điện trở này sẽ chạy qua thiết bị đo. Trong trường hợp này, hướng của dòng điện này cho biết điện trở của cảm biến đã thay đổi như thế nào (tăng hoặc giảm).Tại đây, với sự lựa chọn thích hợp về độ nhạy của thiết bị đo, tất cả quy mô làm việc.
Mạch cầu đang xét gọi là không cân bằng, khi quá trình đo lường diễn ra tại mất cân bằng cây cầu, tức là mất cân đối. Mạch cầu không cân bằng thường được sử dụng nhất trong trường hợp điện trở của cảm biến dưới tác động của ngoại lực có thể thay đổi rất nhanh trên một đơn vị thời gian, nhưng sau đó, thay vì thiết bị đo, sẽ tốt hơn nếu sử dụng thiết bị ghi sẽ ghi lại những điều này thay đổi .
Nó được coi là nhạy cảm hơn mạch cầu cân bằng, trong đó một biến trở đo lường đặc biệt R (Hình 3), được trang bị thang đo và được gọi là rheochord trong kỹ thuật đo, được kết nối bổ sung với hai nhánh liền kề.
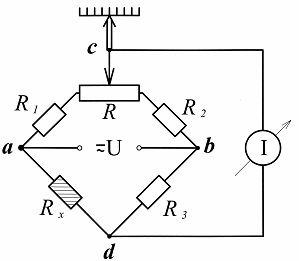
Cơm. 3. Mạch cầu cân bằng
Khi làm việc với một mạch như vậy, với mỗi lần thay đổi điện trở của cảm biến, mạch cầu phải được cân bằng lại với thanh trượt đi kèm, tức là. trong khi không có dòng điện trong đường chéo đo. Trong trường hợp này, giá trị của tham số đo được (thay đổi giá trị điện trở của cảm biến) được xác định bằng một thang đo đặc biệt được trang bị bản ghi này và được hiệu chỉnh theo đơn vị của giá trị được cảm biến đo.
Độ chính xác cao hơn của cầu cân bằng được giải thích là do việc xác định thiếu dòng điện trong thiết bị đo dễ dàng hơn là đo trực tiếp giá trị của nó và việc cân bằng cầu trong những trường hợp như vậy thường được thực hiện bằng cách sử dụng một động cơ điện đặc biệt được điều khiển bởi tín hiệu mất cân bằng mạch cầu.
Các mạch cầu để chuyển đổi cảm biến được coi là phổ biến, vì chúng có thể được cấp nguồn bằng cả dòng điện một chiều và xoay chiều, và quan trọng nhất, một số cảm biến có thể được kết nối với các mạch này cùng một lúc, điều này góp phần làm tăng không chỉ độ nhạy mà còn cả đo lường độ chính xác.
mạch vi sai việc bao gồm các cảm biến được chế tạo bằng cách sử dụng một máy biến áp đặc biệt được cung cấp bởi mạng dòng điện xoay chiều, cuộn dây thứ cấp được chia thành hai phần giống hệt nhau. Do đó, trong mạch này (Hình 4), hai mạch liền kề được hình thành, mỗi mạch có vòng dòng I1 và I2 riêng. Và giá trị của dòng điện trong thiết bị đo được xác định bởi sự chênh lệch của các dòng điện này và nếu điện trở của cảm biến Rx và điện trở bổ sung Rd bằng nhau thì sẽ không có dòng điện trong thiết bị đo.
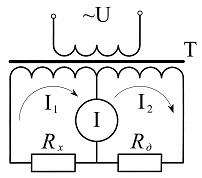
Cơm. 4. Mạch chuyển mạch cảm biến vi sai
Khi điện trở của cảm biến thay đổi, dòng điện tỷ lệ với sự thay đổi này sẽ chạy qua thiết bị đo và pha của dòng điện này sẽ phụ thuộc vào bản chất của sự thay đổi điện trở này (tăng hoặc giảm). Chỉ dòng điện xoay chiều được sử dụng để cấp nguồn cho mạch vi sai, và do đó, việc sử dụng các cảm biến phản ứng (điện cảm hoặc điện dung) làm cảm biến sẽ phù hợp hơn.
Đặc biệt thuận tiện khi sử dụng mạch chuyển mạch như vậy khi làm việc với các cảm biến điện dung hoặc cảm biến vi sai. Khi sử dụng các cảm biến như vậy, không chỉ cường độ của chuyển động, chẳng hạn như lõi sắt từ (Hình 5), mà cả hướng của chuyển động này (dấu hiệu của nó) cũng được ghi lại, do đó pha của chuyển động xoay chiều được ghi lại. dòng điện đi qua thiết bị đo, thay đổi.Điều này càng làm tăng độ nhạy của phép đo.
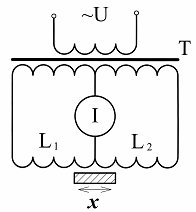
Cơm. 5. Sơ đồ đấu nối cảm biến vi sai điện cảm
Cần lưu ý rằng để tăng độ chính xác của phép đo, trong một số trường hợp, các loại mạch đo tương tự khác được sử dụng, ví dụ: mạch vi sai cân bằng… Các mạch như vậy bao gồm một hợp âm lặp lại hoặc một biến áp tự ngẫu đo lường đặc biệt với thang đo đặc biệt và quá trình đo với các mạch như vậy tương tự như các phép đo với mạch cầu cân bằng.
Án bồi thường việc bao gồm các cảm biến được coi là chính xác nhất trong số những cảm biến đã thảo luận ở trên. Hoạt động của nó dựa trên bù điện áp đầu ra hoặc EMF. một cảm biến tương đương với nó về điện áp rơi trong bộ biến trở đo (rheochord). Chỉ có nguồn một chiều được sử dụng để cấp nguồn cho mạch bù và nó được sử dụng chủ yếu với các cảm biến máy phát điện một chiều.
Hãy xem hoạt động của mạch này bằng ví dụ sử dụng cặp nhiệt điện làm cảm biến (Hình 6).
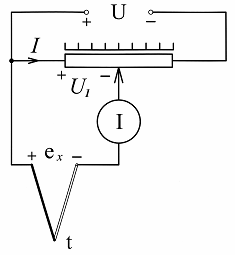
Cơm. 6. Mạch bù bật cảm biến nhiệt điện
Dưới tác động của điện áp đặt vào U, một dòng điện chạy qua bộ biến trở đo, làm giảm điện áp U1 trong phần của bộ biến trở từ đầu ra bên trái của nó đến động cơ. Trong trường hợp điện áp này bằng nhau và cặp nhiệt điện EMF — sẽ không có dòng điện chạy qua máy đo đường huyết.
Nếu giá trị của cảm biến emf thay đổi, cần phải đạt được sự vắng mặt của dòng điện này một lần nữa bằng cách sử dụng thanh trượt của thanh trượt. Ở đây, như trong mạch cầu cân bằng, giá trị của tham số đo được, trong trường hợp của chúng tôi là nhiệt độ (cặp nhiệt điện emf) được xác định bởi thang đo của dây trượt và chuyển động của động cơ của nó được thực hiện, thường xuyên nhất, cũng với sự trợ giúp của một động cơ điện đặc biệt.
Độ chính xác cao của mạch bù là do trong quá trình đo, năng lượng điện do cảm biến tạo ra không bị tiêu hao, vì dòng điện trong mạch bao gồm nó bằng không. Mạch này cũng có thể được sử dụng với các cảm biến tham số, nhưng sau đó cần có thêm nguồn DC, nguồn này được sử dụng trong mạch cấp nguồn của cảm biến tham số.