Động cơ một pha đảo chiều
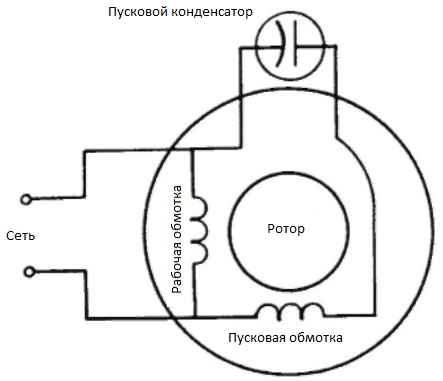
Động cơ cảm ứng được gọi là động cơ một pha, trên stato chỉ có một cuộn dây làm việc, được cung cấp trực tiếp bởi một pha của mạng. Ngoài ra còn có một cuộn dây phụ (khởi động) trong động cơ một pha, cuộn dây này chỉ được sử dụng khi khởi động động cơ để tạo xung ban đầu cho rôto, trên thực tế, cuộn dây khởi động được bật để lấy rôto ra khỏi động cơ. vị trí cân bằng, nếu không nó sẽ không di chuyển nếu không có sự trợ giúp và anh ta sẽ phải bị đẩy theo một cách nào đó.
Giống như bất kỳ động cơ nào, động cơ một pha cũng có rôto quay và stato đứng yên nhưng chỉ dùng để tạo ra từ trường biến thiên theo thời gian. Các cuộn dây làm việc và khởi động được đặt trên stato vuông góc với nhau và cuộn dây làm việc chiếm số rãnh gấp đôi so với cuộn dây khởi động.
Chúng ta có thể nói rằng tại thời điểm khởi động, một động cơ như vậy hoạt động ở chế độ hai pha, sau đó chuyển sang chế độ hoạt động một pha. Rôto của động cơ không đồng bộ một pha là cấu trúc phổ biến nhất - lồng sóc (lồng sóc) hoặc hình trụ (rỗng).
Điều gì sẽ xảy ra nếu không có cuộn dây khởi động nào trên stato, hoặc nó ở đó nhưng không được sử dụng. Trong trường hợp này, khi động cơ được kết nối với mạng, một từ trường dao động sẽ xuất hiện trong cuộn dây làm việc và rôto sẽ rơi xuống dưới điều kiện có từ thông thay đổi xuyên qua nó.
Nhưng nếu rôto ban đầu đứng yên và chúng ta đột ngột chỉ áp dụng một dòng điện xoay chiều cho cuộn dây làm việc, thì rôto sẽ không di chuyển khỏi vị trí của nó, vì tổng mômen quay (theo chiều kim đồng hồ và ngược chiều kim đồng hồ) sẽ bằng không, mặc dù emf gây ra trong rôto.và không có lý do gì để quay vì các lực nổi lên của Ampe triệt tiêu lẫn nhau.
Đó là một vấn đề hoàn toàn khác, nếu rôto được đẩy, nó sẽ tiếp tục quay theo hướng như lực đẩy ban đầu, bởi vì lúc này, không chỉ theo định luật cảm ứng điện từ, một EMF sẽ được tạo ra trong rôto và, theo đó, các dòng điện sẽ phát sinh, theo định luật Ampe sẽ bị đẩy bởi từ trường, nhưng đồng thời (vì rôto đã quay) nên mô-men xoắn theo hướng đẩy sẽ lớn hơn mô-men xoắn ngược với hướng đẩy . Kết quả là, chúng ta có được vòng quay liên tục của rôto.
Để cuộn khởi động đẩy rôto tại thời điểm khởi động, nó không những phải dịch chuyển trong không gian so với cuộn làm việc mà dòng điện trong nó còn phải lệch pha so với dòng cuộn làm việc, khi đó hoạt động kết hợp của hai cuộn dây stato này sẽ không chỉ tương đương với từ trường dao động mà còn tương đương với từ trường quay. Và đây chính xác là những gì cần thiết để tăng tốc rôto khi khởi động động cơ một pha.
Để chuyển pha dòng điện trong cuộn dây khởi động, người ta thường sử dụng tụ điện có điện dung cần thiết, mắc nối tiếp với cuộn dây khởi động và tạo ra sự lệch pha 90 độ. Đây là giải pháp tiêu chuẩn cho động cơ chia pha.
Ngay sau khi động cơ được kết nối với mạng, người vận hành nhấn nút công tắc, nút này sẽ cung cấp năng lượng cho mạch khởi động cuộn dây và ngay khi tốc độ đạt đến giá trị yêu cầu tương ứng với định mức ở tần số nhất định của mạng, nút được phát hành.
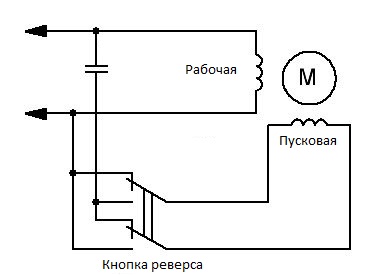
Để có được sự đảo chiều của động cơ khởi động bằng tụ điện một pha, điều kiện đủ là cung cấp xung khởi động theo hướng khác với hướng được cung cấp ban đầu. Điều này đạt được bằng cách thay đổi thứ tự quay pha tương đối trong cuộn dây làm việc và khởi động.
Để đảm bảo các điều kiện này, cần phải chuyển đổi cuộn dây làm việc hoặc khởi động, nghĩa là thay đổi «cực tính» của kết nối các cực của nó với mạng hoặc với mạng và với tụ điện. Điều này rất dễ thực hiện vì trên động cơ một pha có một khối đầu cuối mà mỗi đầu của cả cuộn dây khởi động và chạy đều được đưa ra ngoài. Cuộn dây đang chạy có điện trở hoạt động thấp hơn so với cuộn dây khởi động, vì vậy dễ dàng tìm thấy bằng đồng hồ vạn năng. Giải pháp tốt nhất là đặt các cuộn dây khởi động trên công tắc tạm thời hai cực.