Cách xác định độ trượt của động cơ cảm ứng trong quá trình thiết lập và vận hành
Nếu tốc độ động cơ khác đáng kể so với đồng bộ, được đo bằng máy đo tốc độ hoặc máy phát tốc, được nối trực tiếp với trục của động cơ điện và độ trượt của động cơ được xác định theo công thức S = (n1 — n2) / n1, trong đó n1 = 60f / p — đồng bộ tần số quay; n2 là tốc độ thực tế.
Ưu điểm của phương pháp xác định độ trượt của động cơ điện này: tốc độ đo và khả năng thực hiện cả tốc độ không đổi và tốc độ thay đổi. Nhược điểm của phương pháp đo này bao gồm độ chính xác thấp của máy đo tốc độ thông thường (sai số 1–8%) và khó hiệu chuẩn. Ngoài ra, máy đo tốc độ không thể được sử dụng khi thử nghiệm động cơ điện công suất thấp, vì tổn thất ma sát trong cơ chế máy đo tốc độ thể hiện một tải trọng đáng chú ý.
Để thực hiện các phép đo khác nhau, máy đo tốc độ cầm tay thường được cung cấp một bộ các đầu có hình dạng và mục đích khác nhau có thể hoán đổi cho nhau, được đặt ở cuối con lăn (Hình 1). Loại mẹo này được sử dụng rộng rãi nhất là hình nón cao su, được gắn trong hộp mực kim loại. Tất cả các đầu này dùng để tiếp xúc với hốc nhọn ở cuối trục của máy điện. Đầu trung tâm cao su được sử dụng cho tần số cao, đầu thép cho tần số thấp đến trung bình.
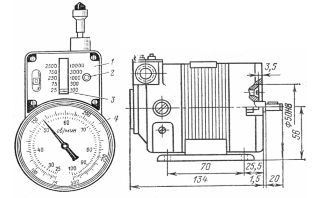 Cơm. 1. Tổng quan về máy đo tốc độ ly tâm loại IO -10 và máy phát điện: 1 — thang đo; 2 — nút chuyển đổi; 3 — chỉ báo giới hạn; 4 — quay số
Cơm. 1. Tổng quan về máy đo tốc độ ly tâm loại IO -10 và máy phát điện: 1 — thang đo; 2 — nút chuyển đổi; 3 — chỉ báo giới hạn; 4 — quay số
Nếu có một lỗ rỗng ở giữa trục, thì một phần mở rộng được sử dụng, phần mở rộng này được đặt trên trục của máy đo tốc độ và đầu tương ứng trên phần mở rộng. Trong trường hợp không có hoặc không đủ tâm, một con lăn được sử dụng để ép từ bề mặt bên (vòng cao su) lên bề mặt của trục quay.
Theo các điều kiện đo cụ thể, hãy chọn một vật cố định (đầu nối dài). Trước khi bắt đầu đo, loại bỏ dầu mỡ, bụi bẩn, bụi bẩn khỏi tâm rãnh hoặc bề mặt trục.
Để đo tốc độ quay của động cơ điện, trước tiên bạn phải đặt giới hạn đo cần thiết của máy đo tốc độ. Nếu không biết thứ tự đo tần số, thì phép đo nên bắt đầu từ giới hạn cao nhất để tránh làm hỏng máy đo tốc độ.
Phép đo nên được thực hiện trong thời gian ngắn (3 - 5 giây) bằng cách ấn cẩn thận đầu của máy đo tốc độ vào trục quay với lực nhẹ sao cho trục của trục máy đo tốc độ trùng với trục của trục được đo hoặc khi sử dụng con lăn, song song với nó.

Nếu độ trượt không vượt quá 5%, tốc độ có thể được đo bằng phương pháp hoạt nghiệm sử dụng đèn neon.
Một đường kính được vẽ ở cuối trục động cơ bằng phấn. Trong khi động cơ đang chạy, nó được chiếu sáng bằng đèn neon chạy bằng mạng có cùng tần số với động cơ. Người quan sát nhìn thấy ở cuối trục không phải là một đường thẳng mà là một ngôi sao đang quay chậm so với hướng quay của trục. Số tia sáng của ngôi sao phụ thuộc vào số cực của động cơ và vị trí của đèn neon. Nếu ánh sáng từ cả hai điện cực của đèn chiếu vào đầu trục thì số tia sáng của ngôi sao nhìn thấy là 2p Nếu chỉ chiếu sáng đầu trục có vạch phấn bằng một điện cực thì số tia sáng của ngôi sao nhìn thấy được bằng số cực.
Trong khoảng thời gian t (thường là 30 giây) được đo bằng đồng hồ bấm giờ, người ta đếm số tia sáng của ngôi sao nhìn thấy m đi qua vị trí thẳng đứng. Vì số tia của ngôi sao có thể nhìn thấy là 2p nên trượt
trong đó f1 là tần số của mạng cung cấp đèn neon.
Tại f1 = 50 Hz.
Một biến thể khác của phương pháp hoạt nghiệm là như sau. Một trong các đĩa được cố định trên trục động cơ từ phía trước (Hình 2). Lắp ráp chuỗi (hình 3). Trong máy lưỡng cực, một đĩa có ký hiệu 2p = 2 được cố định trên trục và được chiếu sáng bằng đèn neon với một điện cực vá.

Cơm. 2… Hình ảnh đĩa hoạt chất tùy theo số cực của động cơ cảm ứng
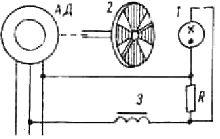
Cơm. 3… Sơ đồ chuyển đổi đèn neon cho phương pháp phát hiện trượt bằng phương pháp nội soi hoạt động: 1 — đèn neon, 2 — đĩa hoạt nghiệm, 3 — cuộn dây cảm ứng
Rôto quay không đồng bộ và trễ so với từ trường nên người ta thấy đĩa quay chậm dần ngược chiều quay của rôto.Nếu trong thời gian t m cung màu đen đi ngang qua một điểm đứng yên (một mũi tên cố định trên một ổ đỡ), thì giá trị trượt được cho bởi biểu thức
Việc đếm các cung đi qua một điểm cố định không được bắt đầu từ thời điểm đồng hồ bấm giờ bắt đầu, mà từ điểm tiếp theo của vạch.
Để có được hình ảnh sắc nét, phải đặt điện áp vào đèn, đường cong của điện áp được thể hiện trong hình. 4… Đèn sáng lên khi điện áp ở các cực của nó đạt đến một giá trị được gọi là ngưỡng đánh lửa.
Cơm. 4... Sơ đồ bật đèn neon để thu được dạng sóng có điện áp nhọn: 1 — đèn neon; 2 - cuộn dây phản kháng có mạch từ bão hòa cao với điện trở cảm ứng X (điện áp rơi trên các điện trở R và X gần như bằng nhau)
Xác định độ trượt của động cơ bằng cuộn dây cảm ứng. Phương pháp này dựa trên việc theo dõi tần số quay của các từ thông phân tán của rôto Fr (Hình 5), với tần số tỷ lệ với độ trượt, đi qua các vòng của cuộn dây cảm ứng.
Cơm. 5. Sơ đồ đo độ trượt rô to của động cơ điện không đồng bộ dùng cuộn dây không đồng bộ
Một millivoltmeter nhạy cảm (tốt nhất là có số 0 ở giữa thang đo) được kết nối với các đầu của cuộn dây; cuộn dây nằm ở cuối trục rôto. Bằng cách xoay cuộn dây theo các hướng khác nhau, họ tìm thấy vị trí quan sát thấy dao động cực đại của mũi tên của dụng cụ. Từ số lần dao động toàn phần k tại thời điểm t tính được giá trị trượt

và tại f = 50 Hz.

Để tính toán, thuận tiện là đếm 50 dao động hoàn chỉnh và ghi lại thời gian bằng đồng hồ bấm giờ. Sau đó: .
Là một cuộn dây cảm ứng, bạn có thể sử dụng cuộn dây rơle hoặc công tắc tơ DC có 10-20 nghìn vòng (hoặc cuộn một cuộn có ít nhất 3000 vòng). Để tăng từ thông, một lõi làm bằng nhiều dải thép biến áp được đưa vào cuộn dây. Phương pháp cuộn dây cảm ứng rất đơn giản và phù hợp với mọi loại máy móc.
Trong động cơ không đồng bộ có rôto dây quấn, ngoài các phương pháp được mô tả ở trên, độ trượt có thể được xác định bằng cách sử dụng ampe kế điện từ được nối với một trong các pha của rôto và khi có điện trở không chuyển mạch trong mạch rôto, sử dụng vôn kế được nối đến các vòng rôto. Nên sử dụng các dụng cụ có thang đo hai mặt. Độ trượt của động cơ cảm ứng được tính từ số lần dao động hoàn chỉnh của kim thiết bị, giống như khi sử dụng phương pháp cuộn dây cảm ứng.
