Động cơ DC không chổi than hiện đại
Nhờ những tiến bộ đáng kể trong lĩnh vực điện tử bán dẫn và công nghệ tạo ra nam châm neodymium mạnh, động cơ DC không chổi than ngày nay được sử dụng rộng rãi. Chúng được sử dụng trong máy giặt, máy hút bụi, quạt, máy bay không người lái, v.v.
Và mặc dù ý tưởng về nguyên lý hoạt động của động cơ không chổi than đã được thể hiện ngay từ đầu thế kỷ 19, nó vẫn chờ đợi cho đến khi bắt đầu kỷ nguyên bán dẫn, khi các công nghệ đã sẵn sàng để triển khai thực tế khái niệm thú vị và hiệu quả này, cho phép các động cơ dòng điện một chiều không chổi than được sử dụng rộng rãi như ngày nay. …
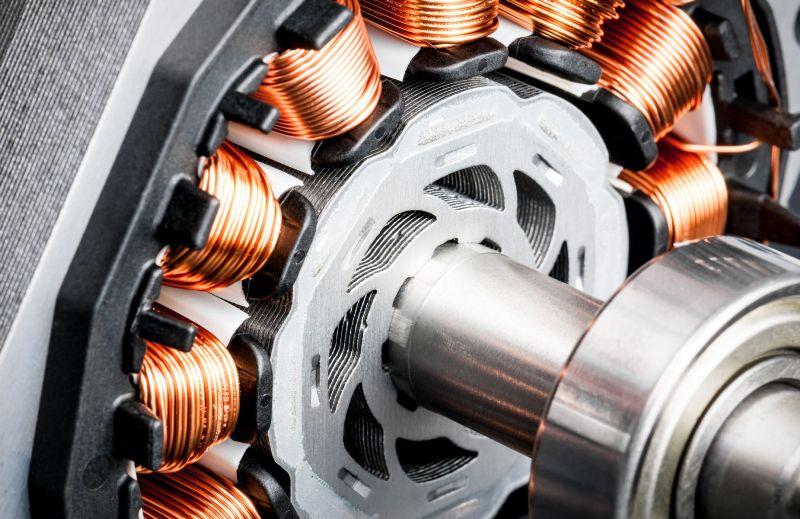
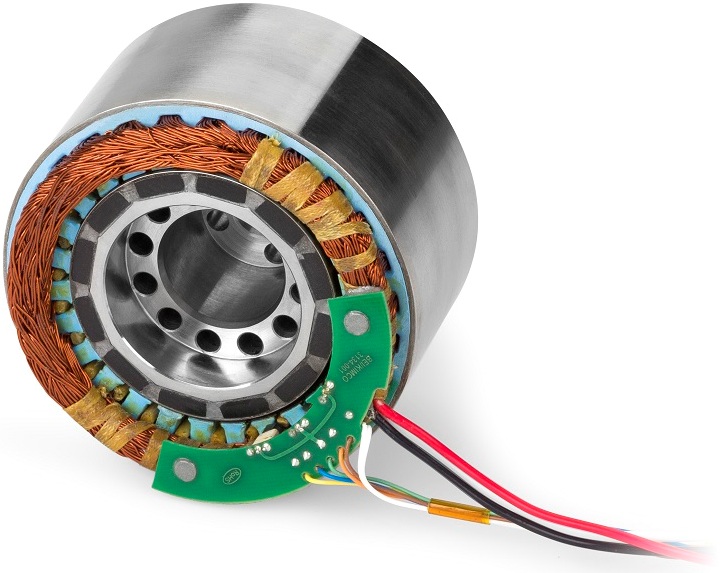
Trong phiên bản tiếng Anh, chúng được gọi là động cơ loại này Động cơ BLDC — Động cơ DC không chổi than - động cơ DC không chổi than. Rôto động cơ chứa nam châm vĩnh cửu, và các cuộn dây làm việc được đặt trên stato, tức là thiết bị động cơ BLDC hoàn toàn trái ngược với những gì có trong động cơ chổi than cổ điển. Động cơ BLDC được điều khiển bởi một bộ điều khiển điện tử gọi là ESC — Bộ điều khiển tốc độ điện tử - kiểm soát hành trình điện tử.
Bộ điều chỉnh điện tử và hiệu quả cao
Bộ điều chỉnh điện tử cho phép năng lượng điện cung cấp cho động cơ không chổi than được thay đổi trơn tru. Không giống như các phiên bản đơn giản hơn của bộ điều tốc điện trở, chỉ giới hạn công suất bằng cách kết nối tải điện trở nối tiếp với động cơ, chuyển đổi năng lượng dư thừa thành nhiệt, điều khiển tốc độ điện tử mang lại hiệu quả cao hơn đáng kể mà không lãng phí năng lượng điện được cung cấp cho quá trình sưởi ấm không cần thiết. ..
Động cơ DC không chổi than có thể được phân loại là động cơ đồng bộ tự điều chỉnh, trong đó một nút kích hoạt yêu cầu bảo trì thường xuyên bị tắt hoàn toàn — nhà sưu tầm… Chức năng của bộ thu được đảm nhận bởi thiết bị điện tử, do đó toàn bộ thiết kế của sản phẩm được đơn giản hóa rất nhiều và trở nên nhỏ gọn hơn.
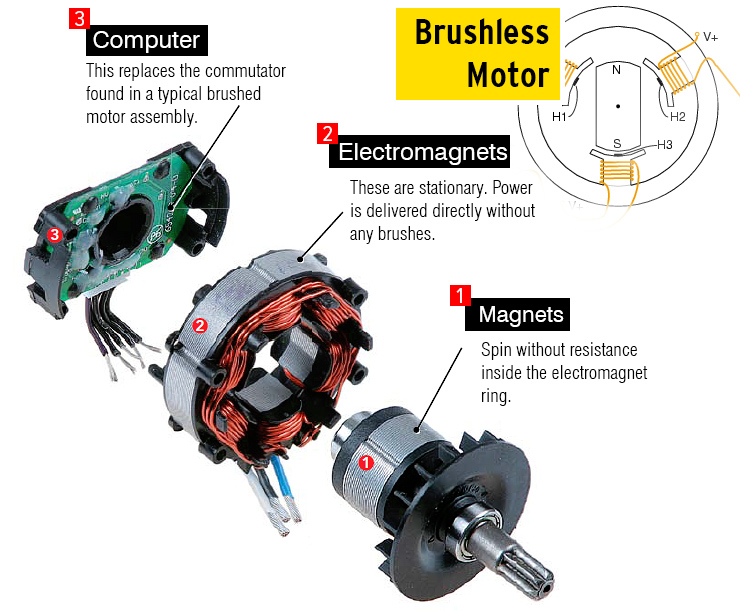
Các bàn chải thực sự được thay thế bằng các công tắc điện tử, tổn thất trong đó nhỏ hơn nhiều so với chuyển mạch cơ học. Nam châm neodymium mạnh mẽ trên rôto cho phép mô-men xoắn lớn hơn trên trục. Và một động cơ như vậy nóng lên ít hơn so với người tiền nhiệm của nó.
Do đó, hiệu suất của động cơ là tốt nhất và công suất trên mỗi kg trọng lượng cao hơn, cộng với phạm vi điều chỉnh tốc độ cánh quạt khá rộng và gần như hoàn toàn không có nhiễu sóng vô tuyến được tạo ra. Về mặt cấu trúc, động cơ loại này dễ dàng thích nghi để làm việc trong môi trường nước và xâm thực.
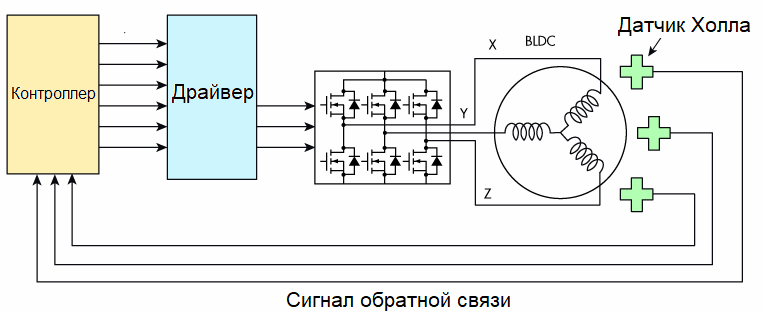
Bộ điều khiển điện tử là một bộ phận rất quan trọng và đắt tiền của động cơ DC không chổi than, nhưng không thể bỏ qua nó.Từ thiết bị này, động cơ nhận được công suất, các thông số đồng thời ảnh hưởng đến cả tốc độ và công suất mà động cơ sẽ có thể phát triển dưới tải.
Ngay cả khi không cần điều chỉnh tốc độ quay thì vẫn cần một bộ phận điều khiển điện tử, bởi vì nó không chỉ mang chức năng điều khiển mà còn có bộ phận cấp nguồn. Chúng ta có thể nói rằng ESC là một dạng tương tự của Bộ điều khiển tần số cho động cơ AC không đồng bộđược thiết kế đặc biệt để cấp nguồn và điều khiển động cơ DC không chổi than.
Điều khiển động cơ BLDC
Để hiểu cách điều khiển động cơ BLDC, trước tiên chúng ta hãy nhớ cách thức hoạt động của động cơ cổ góp. Tại cốt lõi của nó nguyên lý quay khung có dòng điện trong từ trường.
Mỗi khi khung có dòng điện quay và tìm được vị trí cân bằng, bộ chuyển mạch (các chổi than ép vào bộ góp) sẽ đổi hướng dòng điện chạy qua khung và khung tiếp tục chạy. Quá trình này được lặp lại khi khung di chuyển từ cực này sang cực khác. Chỉ trong động cơ bộ thu mới có nhiều khung như vậy và có một số cặp cực từ, đó là lý do tại sao bộ thu chổi than không chứa hai tiếp điểm mà là nhiều.
ECM cũng làm như vậy. Nó đảo ngược cực của từ trường ngay khi rôto phải quay khỏi vị trí cân bằng. Chỉ có điện áp điều khiển không được cung cấp cho rôto mà được cung cấp cho cuộn dây stato và điều này được thực hiện với sự trợ giúp của các công tắc bán dẫn vào đúng thời điểm (các pha của rôto).
Rõ ràng là dòng điện đến cuộn dây stato của động cơ không chổi than phải được cung cấp vào đúng thời điểm, nghĩa là khi rôto ở một vị trí nhất định đã biết. Để thực hiện việc này, hãy sử dụng một trong các phương pháp sau.Đầu tiên dựa trên cảm biến vị trí rôto, thứ hai là bằng cách đo EMF của một trong các cuộn dây hiện không nhận điện.
Các cảm biến khác nhau, từ tính và quang học, phổ biến nhất là cảm biến từ tính hiệu ứng phòng… Phương pháp thứ hai (dựa trên phép đo EMF), mặc dù hiệu quả nhưng không cho phép điều khiển chính xác ở tốc độ thấp và khi khởi động. Mặt khác, cảm biến Hall cung cấp khả năng điều khiển chính xác hơn ở tất cả các chế độ. Có ba cảm biến như vậy trong động cơ BLDC ba pha.
Động cơ không có cảm biến vị trí rôto được áp dụng trong trường hợp động cơ khởi động không tải trục (quạt, cánh quạt, v.v.). Nếu việc khởi động được thực hiện dưới tải, thì cần có một động cơ có cảm biến vị trí rôto. Cả hai lựa chọn đều có ưu và nhược điểm.
Một giải pháp với cảm biến biến thành một điều khiển thuận tiện hơn, nhưng nếu ít nhất một trong số các cảm biến bị hỏng, động cơ sẽ phải được tháo rời, ngoài ra, các cảm biến cần có dây riêng. Trong phiên bản không có cảm biến, không cần dây đặc biệt, nhưng trong quá trình khởi động, rôto sẽ quay qua quay lại. Nếu điều này là không thể chấp nhận được, thì cần phải cài đặt các cảm biến trong hệ thống.
Rôto và stato, số pha
Rôto của động cơ BLDC có thể ở bên ngoài hoặc bên trong và stato bên trong hoặc bên ngoài tương ứng. Stato được làm bằng vật liệu dẫn điện từ, với số răng chia hoàn toàn cho số pha. Rôto có thể được chế tạo, không nhất thiết phải bằng vật liệu dẫn từ tính, nhưng nhất thiết phải có nam châm được gắn chắc chắn vào nó.

Nam châm càng mạnh thì mô-men xoắn khả dụng càng lớn. Số răng của stato không được bằng số nam châm của rôto.Số răng tối thiểu bằng số pha điều khiển.
Hầu hết các động cơ DC không chổi than hiện đại đều là ba pha, đơn giản là để đơn giản hóa thiết kế và điều khiển. Như trong động cơ cảm ứng xoay chiều, các cuộn dây của ba pha được kết nối ở đây với stato bằng "tam giác" hoặc "sao".
Những động cơ như vậy không có cảm biến vị trí rôto có 3 dây nguồn và động cơ có cảm biến có 8 dây: hai dây bổ sung để cấp nguồn cho cảm biến và ba dây cho đầu ra tín hiệu của cảm biến.
Động cơ rôto ngoài tốc độ thấp được chế tạo với số lượng lớn cực (và do đó có răng) trên mỗi pha để thu được chuyển động quay với tần số góc nhỏ hơn đáng kể so với tần số của dòng điện điều khiển. Nhưng ngay cả với động cơ ba pha tốc độ cao, số răng nhỏ hơn 9 thường không được sử dụng.