Đảo ngược và dừng động cơ cảm ứng lồng sóc
Một động cơ cảm ứng là một máy đảo ngược. Để thay đổi hướng quay của rôto, cần thay đổi hướng quay của từ trường (bằng cách chuyển các dây cung cấp sang các cực của hai pha của động cơ) — Mạch khởi động và phanh động cơ
Các đặc tính cơ học cho hai hướng quay được thể hiện trong Hình. 1.
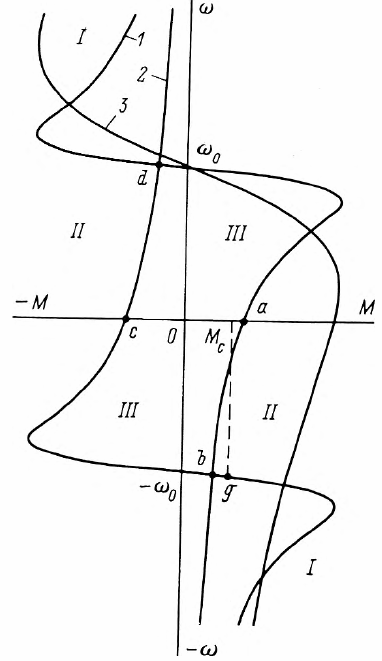
Cơm. 1. Họ các đặc tính cơ học của động cơ cảm ứng cho hoạt động thuận nghịch ở chế độ dừng với nguồn cung cấp năng lượng cho mạng (I), chế độ đối kháng (II) và động cơ (III) 1, 2 — tự nhiên; 3 — nhân tạo.
Một động cơ cảm ứng lồng sóc có thể được sử dụng không chỉ như một động cơ mà còn như một phanh. Ở chế độ dừng, mỗi động cơ điện luôn hoạt động như một máy phát điện. Trong trường hợp này, động cơ điện cảm ứng rôto lồng sóc có thể có ba chế độ hãm.
Ở chế độ hãm tái sinh, máy vận hành với độ trượt âm. Trong trường hợp này, tốc độ của rôto vượt quá tốc độ quay của từ trường.Tất nhiên, để chuyển sang chế độ này, một mômen hoạt động bên ngoài phải được áp dụng cho mặt bên của trục.
Chế độ phản hồi được sử dụng rộng rãi trong việc lắp đặt nâng hạ. Trong quá trình đi xuống, hệ thống đẩy, do thế năng của tải, có thể thu được tốc độ vượt quá tốc độ quay của từ trường và quá trình đi xuống sẽ xảy ra ở trạng thái cân bằng tương ứng với một điểm g nhất định trên đặc tính cơ học , khi mômen tĩnh do tải trọng giảm dần tạo ra, được cân bằng bởi mômen hãm của động cơ.
Trong các ổ đĩa thông thường có mô-men xoắn tĩnh phản ứng, chế độ được đề cập chỉ được thực hiện bằng các mạch điều khiển đặc biệt, giúp giảm tốc độ quay của từ trường. Các đặc tính cơ học của máy cảm ứng cho chế độ phản hồi được thể hiện trong cùng một hình. 1.
Như được hiển thị, mô-men xoắn cực đại ở chế độ máy phát cao hơn một chút so với ở chế độ động cơ và độ trượt tới hạn ở giá trị tuyệt đối là như nhau.
Các máy phát không đồng bộ như vậy có phạm vi rất hẹp, cụ thể là nhà máy điện gió... Vì lực gió không cố định và theo đó, tốc độ quay của thiết bị thay đổi đáng kể, nên sử dụng máy phát điện không đồng bộ trong những điều kiện này.
Được sử dụng rộng rãi nhất là chế độ phanh - đối lập. Việc chuyển đổi sang chế độ này của động cơ không đồng bộ, cũng như động cơ DC, có thể thực hiện được trong hai trường hợp (Hình 1): với sự gia tăng đáng kể mô-men xoắn tĩnh (phần ab) hoặc khi chuyển cuộn dây stato sang hướng quay khác ( phần cd).
Trong cả hai trường hợp, động cơ hoạt động với độ trượt lớn hơn 1 cho đến khi dòng điện vượt quá dòng điện khởi động. Do đó, đối với động cơ lồng sóc, chế độ này chỉ có thể được sử dụng để dừng nhanh biến tần.
Khi đạt đến tốc độ bằng 0, động cơ phải được ngắt khỏi nguồn điện, nếu không nó sẽ có xu hướng tăng tốc theo hướng ngược lại.
Khi phanh bằng động cơ rôto quấn ngược chiều, một điện trở biến trở phải được đưa vào mạch rôto để hạn chế dòng điện và tăng mômen hãm.
Nó cũng có thể chế độ phanh động… Tuy nhiên, điều này gây ra một số khó khăn. Khi ngắt động cơ khỏi nguồn điện, từ trường của máy cũng biến mất. Có thể kích thích máy cảm ứng từ nguồn điện một chiều được nối với stato không được nối với mạng điện xoay chiều. Nguồn phải cung cấp dòng điện trong cuộn dây stato gần bằng danh nghĩa. Vì dòng điện này chỉ bị giới hạn bởi điện trở của cuộn dây nên điện áp nguồn DC phải thấp (thường là 10 — 12 V).
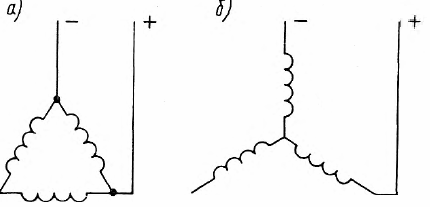
Cơm. 2. Nối stato của động cơ không đồng bộ với nguồn một chiều ở chế độ hãm động năng khi nối tam giác (a) và sao (b)
Tự kích thích cũng được sử dụng để phanh động. Các tụ điện được kết nối với stato bị ngắt kết nối với nguồn điện.
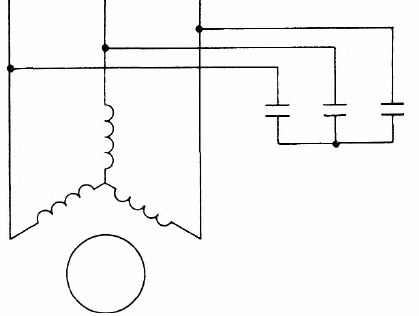
Cơm. 3. Sơ đồ hãm động năng của động cơ không đồng bộ tự kích
Khi rôto quay, một EMF được tạo ra trong mạch stato do từ hóa dư và dòng điện chạy qua cuộn dây stato cũng như qua các tụ điện.Khi đạt đến một tốc độ nhất định trong mạch stato, điều kiện cộng hưởng xảy ra: tổng các điện trở cảm ứng sẽ bằng điện trở dung. Một quá trình tự kích thích chuyên sâu của máy sẽ bắt đầu, điều này sẽ dẫn đến sự gia tăng EMF. Chế độ tự kích sẽ kết thúc khi EMF của máy E và điện áp rơi trên các tụ điện bằng nhau.
Mô-men xoắn phanh tối đa với công suất tăng sẽ chuyển sang tốc độ thấp hơn. Nhược điểm của chế độ phanh được xem xét là chỉ xuất hiện hành động phanh trong một vùng tốc độ nhất định và cần sử dụng tụ điện lớn để phanh ở tốc độ thấp.
Về mặt tích cực, không cần thêm nguồn điện. Chế độ này luôn được thực hiện trong các cài đặt trong đó tụ điện được kết nối với động cơ để cải thiện hệ số công suất của mạng cung cấp.
Xem thêm về chủ đề này: Mạch phanh cho động cơ không đồng bộ