Biến tần - loại, nguyên tắc hoạt động, sơ đồ kết nối
 Rôto của bất kỳ động cơ điện nào được điều khiển bởi các lực gây ra bởi trường điện từ quay bên trong cuộn dây stato. Tốc độ của nó thường được xác định bởi tần số công nghiệp của lưới điện.
Rôto của bất kỳ động cơ điện nào được điều khiển bởi các lực gây ra bởi trường điện từ quay bên trong cuộn dây stato. Tốc độ của nó thường được xác định bởi tần số công nghiệp của lưới điện.
Giá trị tiêu chuẩn của nó là 50 hertz ngụ ý năm mươi chu kỳ dao động trong một giây. Trong một phút, số vòng quay của chúng tăng lên 60 lần và là 50×60 = 3000 vòng quay. Rôto quay cùng một số lần dưới tác động của trường điện từ được áp dụng.
Nếu bạn thay đổi giá trị của tần số nguồn cấp cho stato, thì bạn có thể điều chỉnh tốc độ quay của rôto và biến tần được kết nối với nó. Nguyên tắc này là cơ sở của việc điều khiển động cơ điện.
Các loại biến tần
Theo thiết kế, bộ biến tần là:
1. loại cảm ứng;
2. điện tử.
Sản xuất động cơ không đồng bộ theo sơ đồ với một rôto pha và bắt đầu ở chế độ máy phát điện, là đại diện của loại đầu tiên. Trong quá trình hoạt động, chúng có hiệu quả thấp và được đặc trưng bởi hiệu quả thấp.Do đó, chúng không tìm thấy ứng dụng rộng rãi trong sản xuất và được sử dụng cực kỳ hiếm.
Phương pháp chuyển đổi tần số điện tử cho phép điều chỉnh tốc độ trơn tru của cả máy không đồng bộ và máy đồng bộ. Trong trường hợp này, có thể áp dụng một trong hai nguyên tắc điều khiển:
1. Theo đặc tính định trước về sự phụ thuộc của tốc độ quay vào tần số (V/f);
2. phương pháp kiểm soát véc tơ.
Phương pháp đầu tiên là đơn giản nhất và kém hoàn hảo nhất, còn phương pháp thứ hai được sử dụng để kiểm soát chính xác tốc độ quay của các thiết bị công nghiệp quan trọng.
Các tính năng của điều khiển véc tơ chuyển đổi tần số
Điểm khác biệt giữa phương pháp này là sự tương tác, ảnh hưởng của thiết bị điều khiển bộ chuyển đổi lên «vectơ không gian» của từ thông quay với tần số của trường rôto.
Các thuật toán để bộ chuyển đổi hoạt động theo nguyên tắc này được tạo theo hai cách:
1. điều khiển không cảm biến;
2. điều hòa dòng chảy.
Phương pháp thứ nhất dựa trên việc xác định sự phụ thuộc nhất định vào sự xen kẽ của các trình tự điều chế độ rộng xung (PWM) biến tần cho các thuật toán đặt trước. Trong trường hợp này, biên độ và tần số của điện áp đầu ra bộ biến đổi được điều khiển bởi dòng trượt và tải, nhưng không sử dụng phản hồi tốc độ rôto.
Phương pháp này được sử dụng khi điều khiển một số động cơ điện được kết nối song song với bộ biến tần.Kiểm soát từ thông liên quan đến việc giám sát các dòng điện hoạt động bên trong động cơ với sự phân tách của chúng thành các thành phần hoạt động và phản kháng, đồng thời điều chỉnh hoạt động của bộ chuyển đổi để đặt biên độ, tần số và góc cho các vectơ điện áp đầu ra.
Điều này cải thiện độ chính xác của động cơ và tăng giới hạn điều chỉnh của nó. Việc sử dụng điều khiển lưu lượng giúp mở rộng khả năng của các bộ truyền động hoạt động ở tốc độ thấp với tải trọng động cao, chẳng hạn như cần trục hoặc máy cuộn công nghiệp.
Việc sử dụng công nghệ véc-tơ cho phép thực hiện điều khiển mô-men xoắn động động cơ không đồng bộ ba pha.
Mạch tương đương
Một mạch điện đơn giản cơ bản của động cơ cảm ứng có thể được biểu diễn như sau.
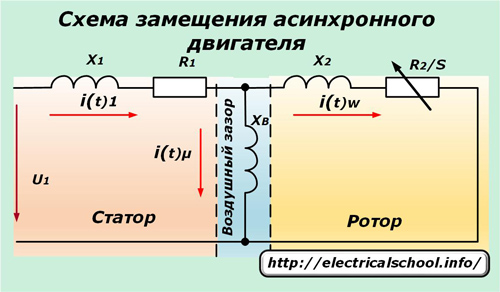
Một điện áp u1 được đặt vào cuộn dây stato có điện trở hoạt động R1 và điện trở cảm ứng X1. Nó, vượt qua điện trở của khe hở không khí Xv, được chuyển thành cuộn dây rôto, tạo ra dòng điện vượt qua điện trở của nó trong đó.
Mạch tương đương của mạch vectơ
Cấu trúc của nó giúp hiểu được các quá trình diễn ra trong động cơ cảm ứng.

Năng lượng của dòng điện stato được chia thành hai phần:
-
iµ — phân vùng tạo dòng chảy;
-
iw - thành phần tạo thời điểm.
Trong trường hợp này, rôto có điện trở hoạt động phụ thuộc trượt R2 / s.
Đối với điều khiển không cảm biến, các thông số sau được đo:
-
điện áp u1;
-
i1 hiện tại.
Theo giá trị của họ, họ tính toán:
-
iµ — thành phần lưu lượng tạo thành dòng chảy;
-
iw - mô-men xoắn tạo ra giá trị.
Thuật toán tính toán hiện bao gồm một mạch tương đương điện tử của động cơ cảm ứng với bộ điều chỉnh dòng điện, có tính đến các điều kiện bão hòa của trường điện từ và tổn thất năng lượng từ tính trong thép.
Cả hai thành phần của vectơ dòng điện, khác nhau về góc và biên độ, quay cùng với hệ tọa độ rôto và trở thành một hệ thống định hướng tĩnh của stato.
Theo nguyên tắc này, các thông số của bộ biến tần được điều chỉnh theo tải của động cơ cảm ứng.
Nguyên lý hoạt động của biến tần
Thiết bị này, còn được gọi là biến tần, hoạt động dựa trên sự thay đổi kép về dạng sóng của nguồn điện lưới.
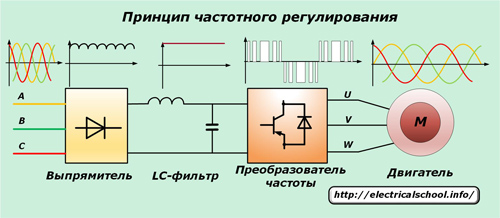
Ban đầu, điện áp công nghiệp được cấp cho một bộ chỉnh lưu với các điốt mạnh giúp loại bỏ các sóng hài hình sin nhưng để lại các gợn sóng tín hiệu. Để loại bỏ chúng, một dãy tụ điện có độ tự cảm (bộ lọc LC) được cung cấp, mang lại hình dạng ổn định, nhẵn cho điện áp được chỉnh lưu.
Sau đó, tín hiệu đi đến đầu vào của bộ biến tần, là mạch cầu ba pha gồm sáu bóng bán dẫn điện Sê-ri IGBT hoặc MOSFET với điốt bảo vệ điện áp phân cực ngược. Các thyristor được sử dụng trước đây cho các mục đích này không có đủ tốc độ và hoạt động với nhiễu lớn.
Để bật chế độ "phanh" của động cơ, có thể lắp đặt một bóng bán dẫn được điều khiển với điện trở mạnh giúp tiêu tán năng lượng trong mạch. Kỹ thuật này cho phép loại bỏ điện áp do động cơ tạo ra để bảo vệ các tụ lọc không bị sạc quá mức và hư hỏng.
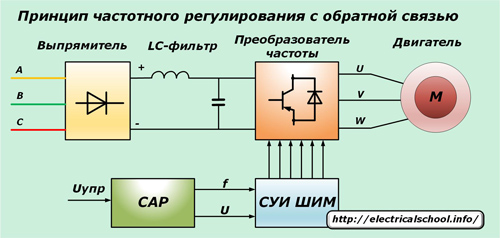
Phương pháp điều khiển tần số vectơ của bộ chuyển đổi cho phép bạn tạo các mạch thực hiện điều khiển tự động tín hiệu từ các hệ thống ACS. Một hệ thống quản lý được sử dụng cho việc này:
1. biên độ;
2. PWM (mô phỏng độ rộng xung).
Phương pháp điều khiển biên độ dựa trên việc thay đổi điện áp đầu vào và PWM dựa trên thuật toán chuyển đổi các bóng bán dẫn công suất ở điện áp đầu vào không đổi.
Với quy định PWM, một khoảng thời gian điều chế tín hiệu được tạo ra khi cuộn dây stato được kết nối theo thứ tự nghiêm ngặt với các cực dương và cực âm của bộ chỉnh lưu.
Do tần số xung nhịp của máy phát khá cao nên trong cuộn dây của động cơ điện có điện trở cảm ứng, chúng được làm mịn thành sóng hình sin bình thường.
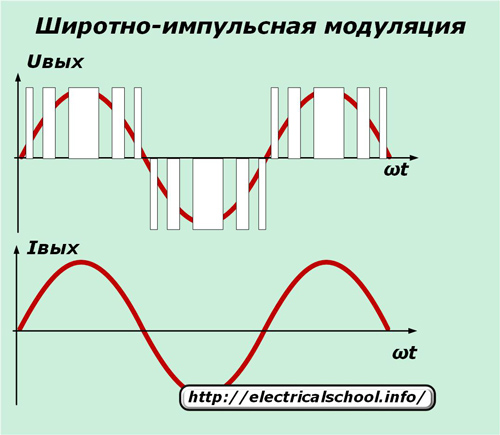
Các phương pháp điều khiển PWM tối đa hóa việc loại bỏ tổn thất năng lượng và mang lại hiệu suất chuyển đổi cao do điều khiển đồng thời tần số và biên độ. Chúng đã trở nên khả dụng do sự phát triển của công nghệ điều khiển thyristor khóa nguồn dòng GTO hoặc nhãn hiệu lưỡng cực của bóng bán dẫn IGBT cổng cách điện.
Các nguyên tắc bao gồm chúng để điều khiển động cơ ba pha được hiển thị trong ảnh.
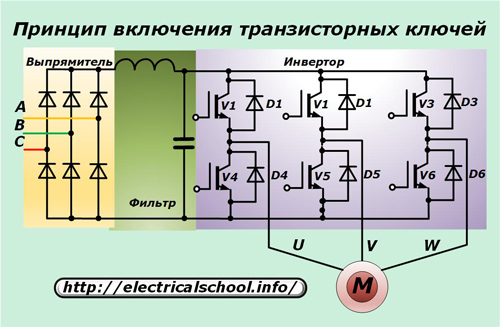
Mỗi trong số sáu IGBT được kết nối trong mạch phản song song với đi-ốt dòng điện ngược của chính nó. Trong trường hợp này, dòng điện hoạt động của động cơ cảm ứng đi qua mạch nguồn của mỗi bóng bán dẫn và thành phần phản ứng của nó được dẫn qua các điốt.
Để loại bỏ ảnh hưởng của nhiễu điện bên ngoài đến hoạt động của biến tần và động cơ, mạch của bộ biến tần có thể bao gồm bộ lọc giảm tiếng ồnthanh toán:
-
nhiễu vô tuyến;
-
phóng điện do vận hành thiết bị.
Chúng được báo hiệu bởi bộ điều khiển và hệ thống dây điện được che chắn được sử dụng giữa động cơ và các đầu ra của biến tần để giảm sốc.
Để cải thiện độ chính xác hoạt động của động cơ không đồng bộ, mạch điều khiển của bộ biến tần bao gồm:
-
đầu vào giao tiếp với khả năng giao diện nâng cao;
-
bộ điều khiển tích hợp;
-
thẻ nhớ;
-
phần mềm;
-
màn hình LED thông tin hiển thị các thông số đầu ra chính;
-
bộ cắt phanh và bộ lọc EMC tích hợp;
-
hệ thống làm mát mạch dựa trên việc thổi bằng quạt tăng tài nguyên;
-
chức năng làm nóng động cơ bằng dòng điện một chiều và một số khả năng khác.
Sơ đồ nối dây hoạt động
Bộ biến tần được thiết kế để hoạt động với mạng một pha hoặc ba pha. Tuy nhiên, nếu có các nguồn dòng điện một chiều công nghiệp có điện áp 220 volt, thì các bộ biến tần có thể được cấp nguồn từ chúng.

Các mô hình ba pha được thiết kế cho điện áp lưới 380 volt và cung cấp cho động cơ điện. Biến tần một pha được cung cấp bởi 220 volt và đầu ra ba pha được phân phối theo thời gian.
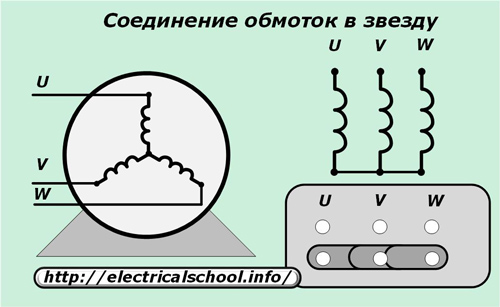
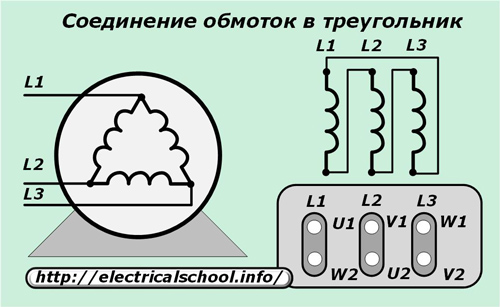
Sơ đồ kết nối của bộ biến tần với động cơ có thể được thực hiện theo sơ đồ:
-
ngôi sao;
-
Tam giác.
Các cuộn dây của động cơ được lắp ráp trong một "ngôi sao" cho bộ chuyển đổi, được cung cấp bởi mạng ba pha 380 volt.
Theo sơ đồ "delta", các cuộn dây của động cơ được lắp ráp khi bộ chuyển đổi nguồn được kết nối với mạng 220 volt một pha.
Khi chọn phương pháp kết nối động cơ điện với bộ biến tần, bạn cần chú ý đến tỷ lệ công suất mà động cơ đang chạy có thể tạo ra ở tất cả các chế độ, bao gồm khởi động chậm, có tải, với khả năng của biến tần.
Không thể liên tục làm quá tải bộ biến tần và một lượng dự trữ nhỏ công suất đầu ra của nó sẽ đảm bảo hoạt động lâu dài và không gặp sự cố.