Điều chỉnh tốc độ góc của động cơ cảm ứng bằng cách thay đổi số cặp cực của stato
 Khi số cặp cực tăng lên, vận tốc góc của trường giảm, do đó tốc độ rôto của động cơ cảm ứng cũng giảm. Phiên bản đặc biệt động cơ không đồng bộ hai tốc độ, cuộn dây stato bao gồm các bộ phận riêng biệt. Chúng có thể được kết nối lại theo hai cách khác nhau: một ngôi sao và một ngôi sao đôi (Hình 1, a, b) hoặc một hình tam giác và một ngôi sao đôi (Hình 1, b, d).
Khi số cặp cực tăng lên, vận tốc góc của trường giảm, do đó tốc độ rôto của động cơ cảm ứng cũng giảm. Phiên bản đặc biệt động cơ không đồng bộ hai tốc độ, cuộn dây stato bao gồm các bộ phận riêng biệt. Chúng có thể được kết nối lại theo hai cách khác nhau: một ngôi sao và một ngôi sao đôi (Hình 1, a, b) hoặc một hình tam giác và một ngôi sao đôi (Hình 1, b, d).
Trong sao đôi, tốc độ trường luôn gấp đôi so với sao hoặc tam giác. Tuy nhiên, các công tắc này không bằng nhau. Thực tế là mô-men xoắn tối đa cho phép trong quá trình hoạt động liên tục được xác định bởi dòng điện pha tối đa cho phép theo điều kiện phát nóng của cuộn dây và phụ thuộc vào từ thông stato tỷ lệ với bình phương điện áp pha. Sức mạnh cho phép dài hạn cũng phụ thuộc vào các giá trị tương tự.
Nếu bạn chuyển các cuộn dây của động cơ từ sao sang sao đôi, điện áp pha sẽ không thay đổi và khi chuyển từ sao tam giác sang sao đôi, nó sẽ giảm √3 lần. Nhưng với sao đôi, dòng điện trong mỗi pha có thể gấp đôi so với sao hoặc tam giác, vì mỗi pha gồm hai nhánh song song. Sau đó, chúng tôi thấy rằng khi đi từ một ngôi sao sang một ngôi sao đôi, tốc độ và sức mạnh tăng gấp đôi, do đó thời điểm tới hạn không đổi (M = P /ω= const).
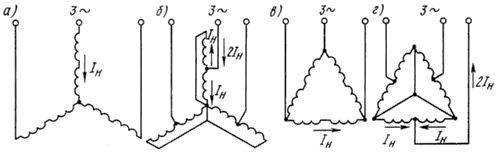
Cơm. 1. Sơ đồ nối cuộn dây stato của động cơ không đồng bộ theo kiểu sao (a) và sao đôi (b), theo kiểu tam giác (c) và sao đôi (d)
Nếu bạn đi từ sao tam giác sang sao đôi, điện áp pha giảm √3 lần. Khi đó, ngay cả với dòng điện hai pha, công suất sẽ chỉ tăng 2 /√3 = l,18 lần và có thể coi như không thay đổi. Trong trường hợp này, khi vận tốc góc tăng theo hệ số hai, công suất gần như thay đổi và mô men giảm xấp xỉ theo hệ số hai. Do đó, nên sử dụng động cơ để điều khiển các thiết bị nâng có cuộn dây được nối theo hình sao và để điều khiển máy cắt kim loại, động cơ có cuộn dây stato được kết nối theo hình tam giác.

Cơm. 2. Dữ liệu hộ chiếu của động cơ nhiều tốc độ
Có những động cơ điện không đồng bộ với hai cuộn dây stato được cách ly với nhau, một trong số chúng không có công tắc và cuộn thứ hai có các cực chuyển mạch. Sau đó, thu được động cơ ba tốc độ. Nếu cả hai cuộn dây được thay đổi cực, thì động cơ là bốn cấp. Trong một số trường hợp, hai cuộn dây cách điện với số cặp cực khác nhau được sử dụng. pp mà không cần chuyển đổi.Ví dụ, trong động cơ thang máy p1 = 3 và p2 = 12, tương ứng với tốc độ quay đồng bộ là 1000 và 250 vòng / phút.
Trong bộ lễ phục. 3a thể hiện các đặc tính cơ của động cơ sao đôi đến sao kép hai tốc độ và FIG. 3, b — khi thay đổi từ hình tam giác sang hình sao đôi.
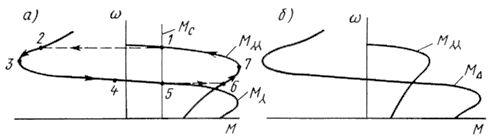
Cơm. 3... Đặc tính cơ của động cơ điện không đồng bộ khi chuyển từ sao sang sao đôi (a) và từ sao tam giác sang sao đôi (b)
Trong trường hợp thay đổi nhanh từ tốc độ cao hơn sang tốc độ thấp hơn, động cơ sẽ chạy một lúc. chế độ treo… Trên thực tế, nếu tốc độ của trường giảm, thì ở thời điểm đầu tiên rôto tiếp tục quay với tốc độ như cũ.
Động cơ ngay lập tức chuyển từ đặc tính này sang đặc tính khác, tức là từ điểm 1 đến điểm 2 (Hình 3, a). Hãm tái sinh theo sau (điểm 2, 3, 4), tại điểm 5 nó bắt đầu hoạt động ở trạng thái ổn định. Nếu bạn chuyển từ tốc độ thấp hơn sang tốc độ cao hơn, động cơ sẽ ngay lập tức di chuyển từ điểm 5 đến điểm b, sau đó gia tốc sẽ theo sau (điểm 6 và 7) và tại điểm 1, trạng thái cân bằng lại xuất hiện.