Đặc tính cơ học của động cơ cảm ứng ở các chế độ, điện áp và tần số khác nhau
 Các đặc tính cơ học của động cơ cảm ứng có thể được biểu thị bằng n = f (M) hoặc n=e(I). Tuy nhiên, các đặc tính cơ của động cơ không đồng bộ thường được biểu thị dưới dạng phụ thuộc M = f(S), trong đó C — trượt, S = (nc-n) / nc, trong đó ns — tốc độ đồng bộ.
Các đặc tính cơ học của động cơ cảm ứng có thể được biểu thị bằng n = f (M) hoặc n=e(I). Tuy nhiên, các đặc tính cơ của động cơ không đồng bộ thường được biểu thị dưới dạng phụ thuộc M = f(S), trong đó C — trượt, S = (nc-n) / nc, trong đó ns — tốc độ đồng bộ.
Trong thực tế, một công thức đơn giản hóa được gọi là công thức Kloss được sử dụng để xây dựng đồ họa của các đặc tính cơ học:

ở đây: Mk — giá trị mô-men xoắn tới hạn (tối đa). Giá trị thời điểm này tương ứng với trượt quan trọng

trong đó λm = Mk / Mn
Công thức của Kloss được sử dụng để giải quyết các vấn đề liên quan đến truyền động điện được thực hiện bằng động cơ cảm ứng. Sử dụng công thức Kloss, bạn có thể xây dựng biểu đồ đặc tính cơ học theo dữ liệu hộ chiếu của động cơ cảm ứng. Đối với các tính toán thực tế, chỉ nên xem xét dấu cộng trong công thức khi xác định thời điểm tới hạn trước gốc.
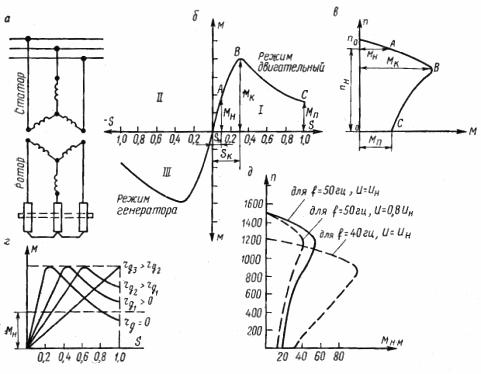
Cơm. 1.Động cơ không đồng bộ: a — sơ đồ nguyên lý, b — đặc tính cơ M = f (S) — tự nhiên ở chế độ động cơ và máy phát, c — đặc tính cơ tự nhiên n = f (M) ở chế độ động cơ, d — đặc tính cơ của biến trở nhân tạo , e - đặc tính cơ đối với các điện áp và tần số khác nhau.

Động cơ cảm ứng lồng sóc
Như có thể thấy từ hình. 1, đặc tính cơ học của động cơ cảm ứng nằm ở góc phần tư I và III. Phần của đường cong trong góc phần tư I tương ứng với giá trị trượt dương và đặc trưng cho chế độ hoạt động của động cơ không đồng bộ và trong góc phần tư III, chế độ máy phát. Chế độ động cơ là mối quan tâm thực tế lớn nhất.
Biểu đồ đặc tính cơ học của chế độ động cơ chứa ba điểm đặc trưng: A, B, C và có thể được chia thành hai phần: OB và BC (Hình 1, c).
Điểm A tương ứng với mô men xoắn danh nghĩa của động cơ và được xác định theo công thức Mn = 9,55•103•(Strn /nn)
Thời điểm này tương ứng trượt danh nghĩa, đối với động cơ có ứng dụng công nghiệp nói chung có giá trị trong khoảng từ 1 đến 7%, tức là Sn = 1 - 7%. Đồng thời, động cơ nhỏ trượt nhiều hơn và động cơ lớn trượt ít hơn.
Động cơ trượt cao dành cho tải sốc có Сn~15%. Chúng bao gồm, ví dụ, động cơ AC nối tiếp đơn.
Điểm C của đặc tính tương ứng với giá trị mômen ban đầu xuất hiện trên trục động cơ khi khởi động. Thời điểm này Mp được gọi là ban đầu hoặc bắt đầu. Trong trường hợp này, độ trượt bằng đơn vị và vận tốc bằng không. bắt đầu mô-men xoắn thật dễ dàng để xác định từ dữ liệu của bảng tham chiếu, cho thấy tỷ lệ của mô-men xoắn khởi động so với Mp / Mn danh nghĩa.
Độ lớn của mômen khởi động ở các giá trị điện áp và tần số dòng điện không đổi phụ thuộc vào điện trở tác dụng trong mạch rôto. Trong trường hợp này, ban đầu khi điện trở tác dụng tăng thì giá trị của mômen khởi động tăng, đạt cực đại khi điện trở tác dụng của mạch rôto bằng tổng điện trở cảm ứng của động cơ. Sau đó, khi điện trở hoạt động của rôto tăng lên, giá trị của mô-men xoắn ban đầu giảm xuống, có xu hướng về 0 trong giới hạn.
Điểm C (Hình 1, b và c) tương ứng với mômen cực đại mà động cơ có thể phát triển trong toàn bộ dải số vòng quay từ n = 0 đến n = ns... Mômen này được gọi là mômen tới hạn (hoặc lật) Mk . Thời điểm quan trọng cũng tương ứng với trượt quan trọng Sk. Giá trị của độ trượt tới hạn Sk, cũng như giá trị của độ trượt danh nghĩa Сn càng nhỏ, thì độ cứng của các đặc tính cơ học càng lớn.
Thời điểm bắt đầu và thời điểm quan trọng được xác định bởi những thời điểm danh nghĩa. Theo GOST đối với máy điện động cơ lồng sóc phải đáp ứng điều kiện Mn / Mn = 0,9 — 1,2, Mk / Mn = 1,65 — 2,5.
Cần lưu ý rằng giá trị của thời điểm tới hạn không phụ thuộc vào điện trở hoạt động của mạch rôto, trong khi độ trượt tới hạn Сk tỷ lệ thuận với điện trở này.Điều này có nghĩa là với sự gia tăng điện trở hoạt động của mạch rôto, giá trị của thời điểm tới hạn vẫn không thay đổi, nhưng cực đại của đường cong mô-men xoắn sẽ dịch chuyển sang các giá trị trượt tăng dần (Hình 1, d).
Độ lớn của mômen tới hạn tỉ lệ thuận với bình phương điện áp đặt vào stato và tỉ lệ nghịch với bình phương tần số của các điện áp và tần số dòng điện trong stato.
Ví dụ, nếu điện áp cung cấp cho động cơ bằng 85% giá trị định mức, thì độ lớn của mô-men xoắn tới hạn sẽ là 0,852 = 0,7225 = 72,25% mô-men xoắn tới hạn ở điện áp định mức.
Điều ngược lại được quan sát thấy khi thay đổi tần số. Ví dụ, nếu động cơ được thiết kế để hoạt động với tần số dòng điện = 60 Hz, dòng điện cung cấp có tần số = 50 Hz, thì thời điểm tới hạn sẽ đến ở mức (60/50)2=1,44 lần lớn hơn giá trị chính thức tần số của nó (Hình 1, e).
Thời điểm tới hạn đặc trưng cho khả năng quá tải tức thời của động cơ, nghĩa là nó cho biết thời điểm quá tải (trong vài giây) mà động cơ có thể chịu được mà không gây ra bất kỳ hậu quả có hại nào.

Phần của đặc tính cơ học từ 0 đến giá trị lớn nhất (quan trọng) (xem Hình 1, biv) được gọi là phần ổn định của đặc tính và phần BC (Hình 1, c) - phần không ổn định.
Sự phân chia này được giải thích bởi thực tế là trên phần tăng dần của các đặc tính OF với độ trượt tăng dần, tức là khi tốc độ giảm, mô-men xoắn do động cơ tạo ra tăng lên.Điều này có nghĩa là khi tải tăng, tức là khi mô-men xoắn hãm tăng, tốc độ quay của động cơ giảm và mô-men xoắn do nó tăng lên. Khi tải giảm, ngược lại, tốc độ tăng và mô-men xoắn giảm. Khi tải thay đổi trong phạm vi của phần ổn định của đặc tính, tốc độ quay và mô-men xoắn của động cơ thay đổi.
Động cơ không thể phát triển hơn mô-men xoắn tới hạn và nếu mô-men xoắn phanh lớn hơn, chắc chắn động cơ phải dừng lại. Như họ nói, một động cơ rollover xảy ra.
Đặc tính cơ ở U và I không đổi và không có điện trở bổ sung trong mạch rôto được gọi là đặc tính tự nhiên (đặc tính của động cơ cảm ứng lồng sóc có rôto dây quấn không có điện trở bổ sung trong mạch rôto). Các đặc tính nhân tạo hoặc biến trở được gọi là các đặc tính tương ứng với điện trở bổ sung trong mạch rôto.
Tất cả các giá trị mô-men xoắn khởi động là khác nhau và phụ thuộc vào điện trở hoạt động của mạch rôto. Các thanh trượt có độ lớn khác nhau tương ứng với cùng một mô men xoắn danh định Mn. Khi điện trở của mạch rôto tăng, độ trượt tăng và do đó tốc độ của động cơ giảm.
Do đưa điện trở hoạt động vào mạch rôto nên đặc tính cơ ở phần ổn định bị kéo giãn theo hướng tăng độ trượt, tỷ lệ với điện trở.Điều này có nghĩa là tốc độ động cơ bắt đầu thay đổi đáng kể tùy thuộc vào tải của trục và đặc tính cứng trở nên mềm.