Nguyên lý hoạt động của công tắc lân cận cảm ứng, giống và ví dụ về việc sử dụng chúng
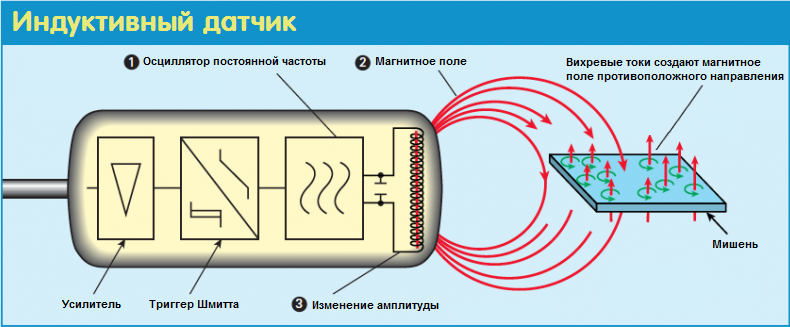
Công tắc cảm ứng không tiếp xúc (cảm biến tiệm cận) được sử dụng để phát hiện vật thể không tiếp xúc tự động với các mục đích công nghiệp khác nhau. Nguyên lý hoạt động của chúng dựa trên hiện tượng thay đổi biên độ dao động của máy phát liên quan đến việc đưa một vật thể sắt từ, từ tính hoặc kim loại có kích thước nhất định vào vùng làm việc của cảm biến.
Khi cảm biến được bật, một từ trường xen kẽ sẽ hoạt động trong khu vực làm việc của nó và nếu bây giờ kim loại được đưa vào khu vực này, thì các mục tiêu sẽ hướng đến kim loại này dòng điện xoáy sẽ gây ra sự thay đổi biên độ dao động ban đầu của máy phát, trong khi cường độ của sự thay đổi sẽ phụ thuộc vào khoảng cách giữa vật kim loại và cảm biến. Giá trị tương ứng của tín hiệu tương tự sẽ được flip-flop chuyển đổi thành tín hiệu logic, tín hiệu này sẽ xác định giá trị độ trễ và mức chuyển đổi.

Bản thân công tắc trong bối cảnh này là một bộ chuyển đổi bán dẫn điều khiển trạng thái của một mạch kích hoạt bên ngoài nhất định tùy thuộc vào vị trí của đối tượng được quan sát và vị trí của đối tượng được xác định mà không cần tiếp xúc cơ học với cảm biến.
Như bạn có thể đã hình dung ra, yếu tố nhạy cảm ở đây là cuộn cảm, có mạch từ mở theo hướng của khu vực làm việc.
Công tắc giới hạn cảm ứng thuộc về một nhóm lớn cảm biến không tiếp xúc cho vị trí của các cơ chế, rất phổ biến trong các hệ thống tự động hiện đại.
Công tắc lân cận cảm ứng trong một hệ thống tự động hóa nhất định đóng vai trò là công cụ chính để giám sát vị trí của một số hạng mục thiết bị, các tín hiệu được xử lý, tùy thuộc vào mục đích của thiết bị, từ bộ đếm sản phẩm, bộ điều khiển chuyển động, hệ thống báo động, vv n. .
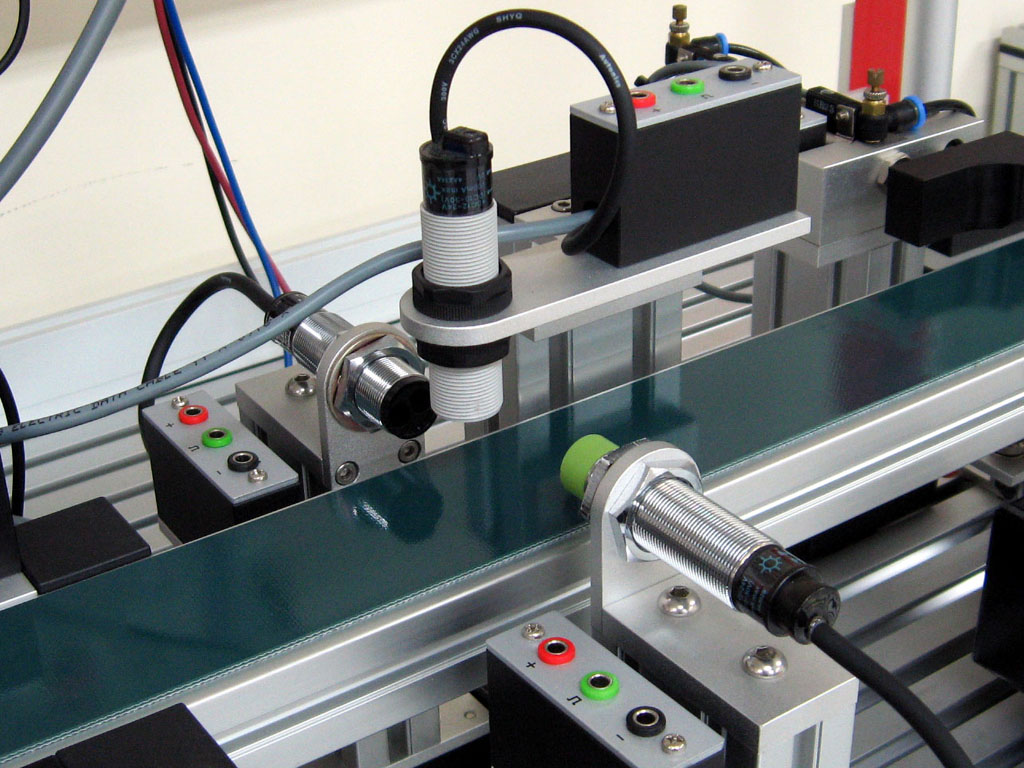
Đặc biệt, công tắc lân cận cảm ứng thường được sử dụng để đếm các vật kim loại và theo dõi vị trí của chúng, ví dụ: chai di chuyển dọc theo băng tải, trên nắp của chúng được đếm hoặc trong cửa hàng lắp ráp, thay đổi công cụ xảy ra sau bộ đếm, mặt bích nằm trong phạm vi của một cảm biến điện cảm. …
Quá trình hoạt động của công tắc có thể được mô tả như sau. Ở trạng thái làm việc, một từ trường có xung biên độ không đổi ở phía trước bề mặt làm việc của cảm biến không tiếp xúc.
Nếu kim loại đến gần cảm biến (ví dụ: nắp thiếc của chai hoặc một phần của bộ phận liên quan đến lắp ráp rô bốt), thì sẽ có xu hướng làm giảm dao động của từ trường, theo đó, giá trị của điện áp giải điều chế sẽ giảm xuống, bộ kích hoạt được kích hoạt, điều này dẫn đến khi phần tử chuyển mạch được chuyển đổi (ví dụ: cho đến khi bộ đếm được kích hoạt hoặc cho đến khi công cụ được thay đổi).
Tất cả các vật kim loại có đủ kích thước, ví dụ: phần nhô ra của trục, mặt bích, tấm thép, đầu bu lông khớp nối, v.v., đều có thể đóng vai trò là vật điều khiển hoặc đếm cho công tắc cảm ứng không tiếp xúc.

Theo nguyên tắc chuyển mạch của mạch điều khiển và phương pháp kết nối với nó, cảm biến cảm ứng có nhiều loại, với số lượng dây khác nhau. Các cảm biến được chế tạo trên cơ sở các công tắc NPN hoặc PNP, chúng có thể ở trạng thái thường đóng hoặc thường mở.
Hai dây - chúng được kết nối trực tiếp với mạch tải và được cấp nguồn qua nó, ở đây điều rất quan trọng là phải quan sát cực tính và điện trở tải danh nghĩa, nếu không cảm biến sẽ không hoạt động chính xác.
Công tắc ba dây là phổ biến nhất, chúng có nguồn trên hai dây và dây thứ ba được sử dụng để kết nối tải được chuyển đổi.
Cuối cùng, công tắc bốn dây có khả năng chọn chế độ chuyển mạch (thường đóng hoặc thường mở).
Một loại cảm biến vị trí phổ biến khác trong các hệ thống tự động hiện đại: Công tắc tiệm cận quang học